前回ルンバで作成した地図からシミュレータGazeboで使うWorldを作成してみました。
今回は shilohc/map2gazebo を使っています。
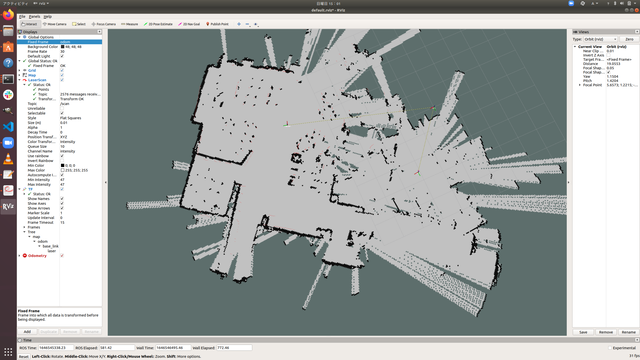
元となるSLAMで作成した地図はこちらです。
map2gazeboのインストール
map2gazeboのREADME.mdにしたがってインストールします。
1. 必要なpythonパッケージをインストールする。
pip install --user trimesh
pip install --user numpy
2. catkin_wsにcloneする。
cd ~/catkin_ws/src
git clone https://github.com/shilohc/map2gazebo.git
3. ビルドする。
catkin build map2gazebo
source ~/.bashrc
Gazebo worldの作成
1. roscoreを動かします。
roscore
2. 先日取得した2D MAPをmap_serverで配信します。
rosrun map_server map_server my_map3.yaml
3. map2gazeboを実行します。
roslaunch map2gazebo map2gazebo.launch
4. 処理が終了すると Exported STL. You can shut down this node now と表示されますので、指示通りにctrl-cで終了します。
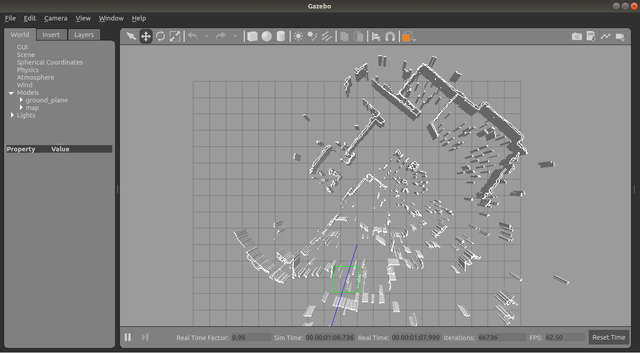
5. 生成したWorldをGazeboで表示します。
roslaunch map2gazebo gazebo_world.launch
以下のようにWorldが表示されれば成功です。
これで実際の地図をもとにしてGazeboである程度のシミュレーションができそうです。
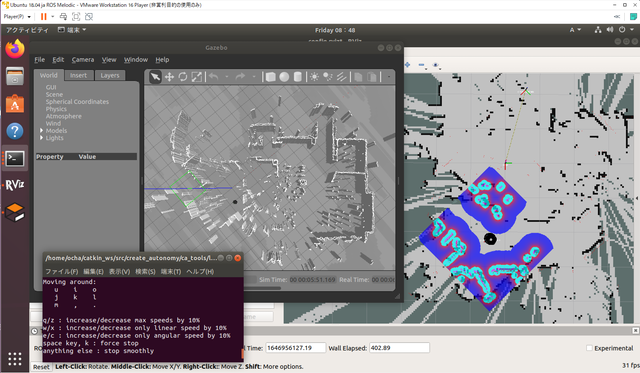
もう少しmapの精度を良くしてworldを作成してみます。