Retro Computing
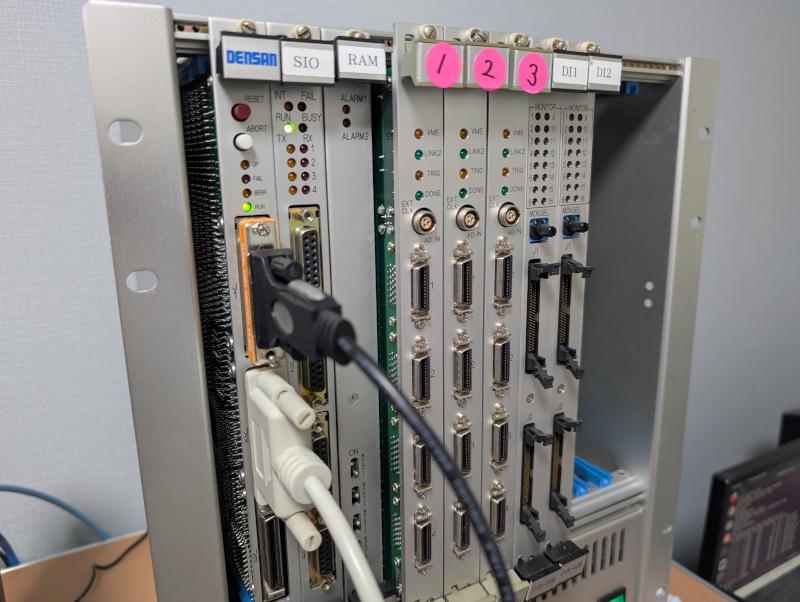
V53 VMEシステムで遊ぶ #17 ELKSでIPネットワークに接続する
Retro Computing
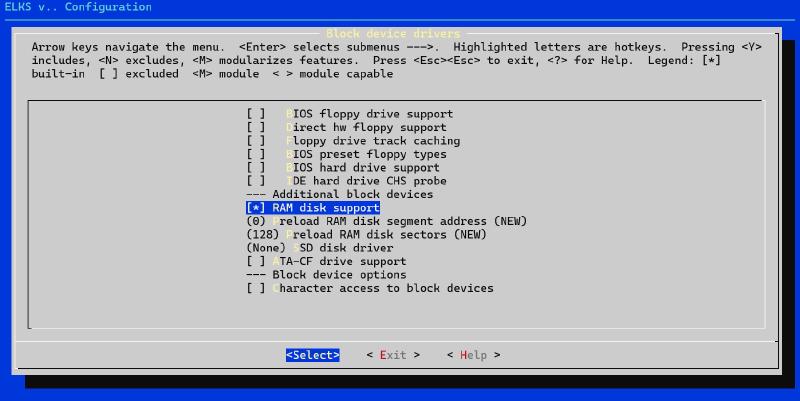
V53 VMEシステムで遊ぶ #16 ELKSでRAMDISKを使う
Retro Computing
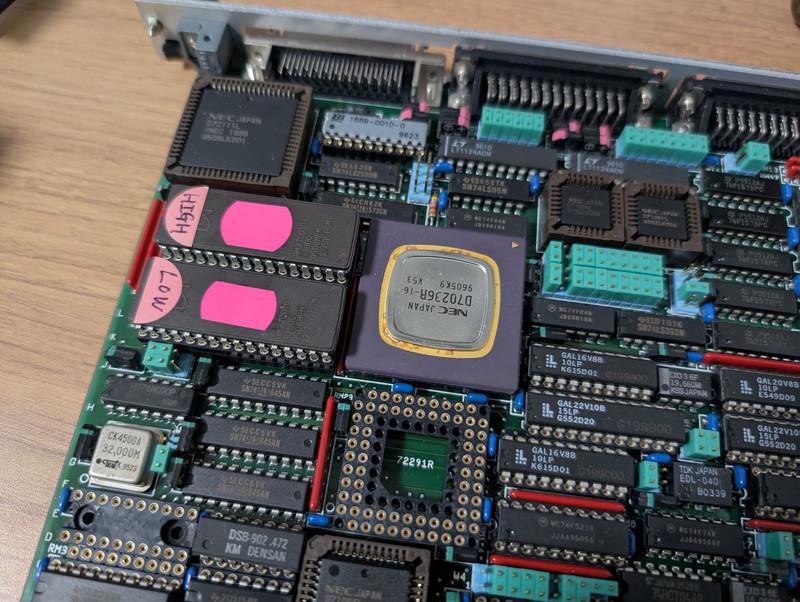
V53 VMEシステムで遊ぶ #15 ELKSをV53対応にする
Retro Computing
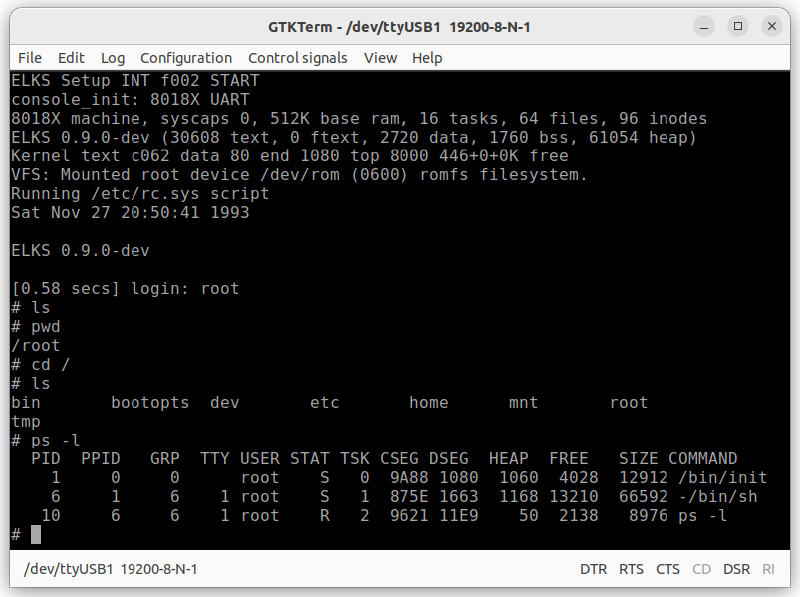
V53 VMEシステムで遊ぶ #14 ELKSを動かす
Retro Computing
V53 VMEシステムで遊ぶ #13 NASCOM BASICを動かす
Electronics
未サポートのESP32C6をArduino Cloudで使ってみた
1
2
…
204