TurtleBot3 Burgerのパーツ確認が終わったところで組み立て開始です。マニュアルを外箱に載せて見ながら作業します。
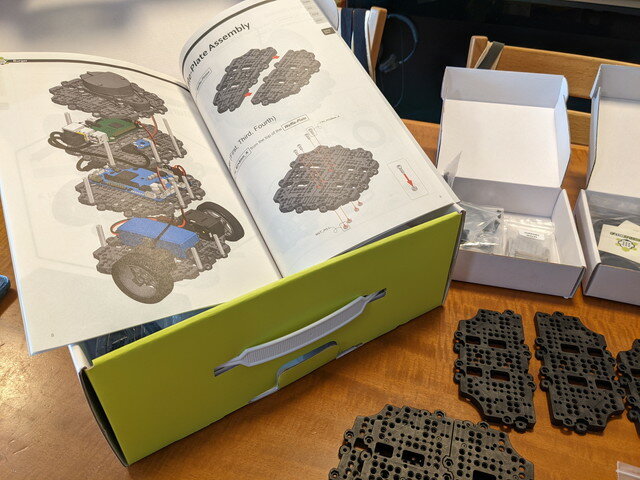
プレートの組み立て
まずはベースとなるプレートを4枚作ります。大量のネジがあるので間違えないように注意します。

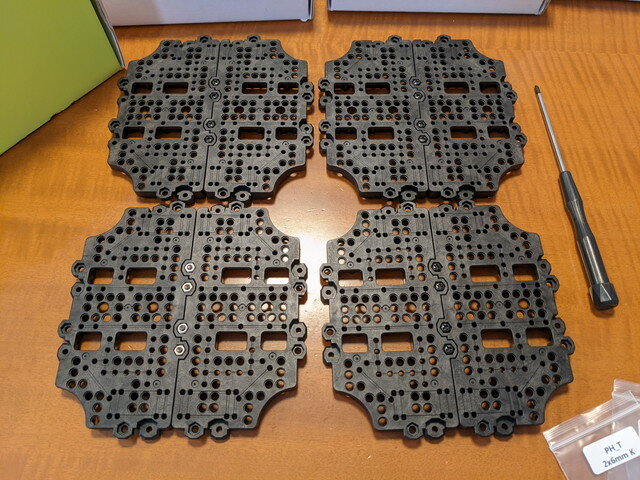
プレート4枚が完成しました。2nd Layerだけネジの向きが違います。
完成したプレートにパーツを取り付けていきます。
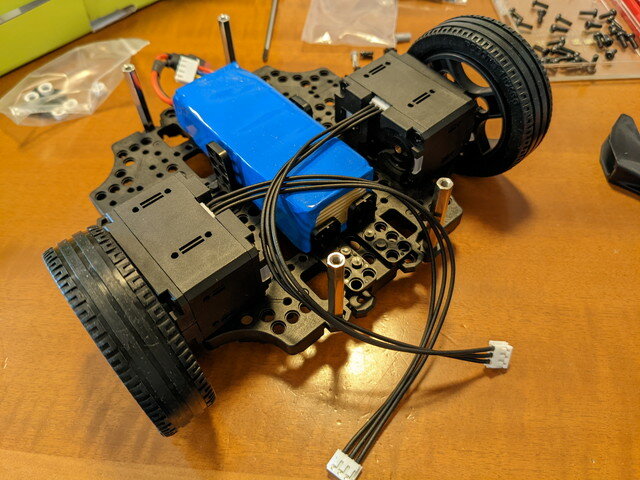
1st Layerの組み立て
1st Layerではまずバッテリーを固定するパーツを取り付けます。

次にタイヤをホイールに取り付けて、モーターに固定します。こんな立派なモーターは使ったことがありません。

1st Layerにモーターとバッテリーを固定します。特に問題無さそうです。
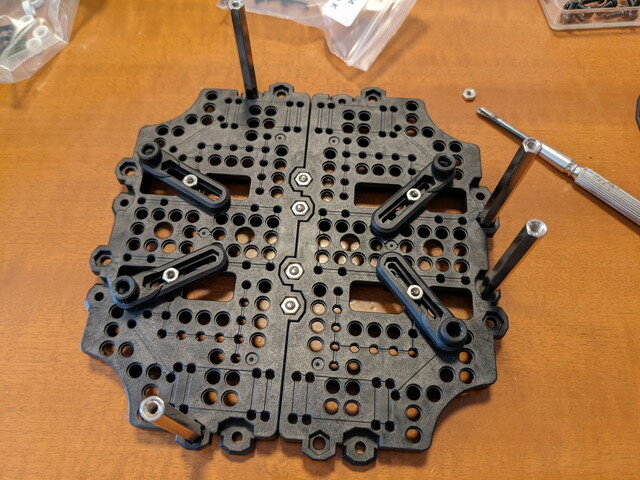
2nd Layerの組み立て
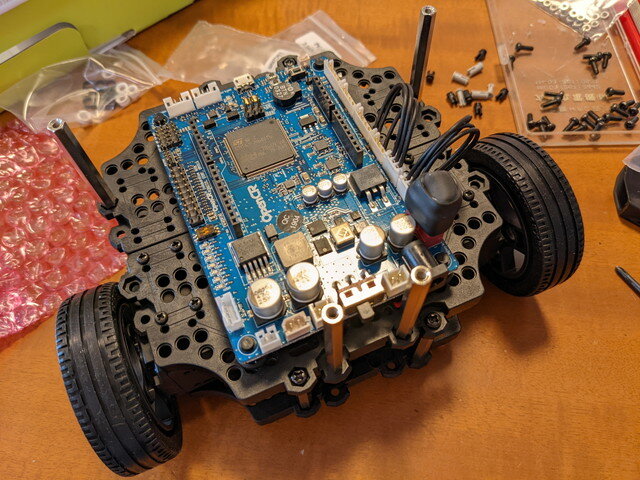
2nd LayerはOpenCRボードを取り付けるために基板固定用のパーツを使いますが、この構造だといろんな基板に対応できそうです。
2nd LayerにOpenCRボードを取り付けたあとに、1st Layerと2nd Layerを合体しOpenCRボードにバッテリーとモーターを接続します。
3rd Layerの組み立て
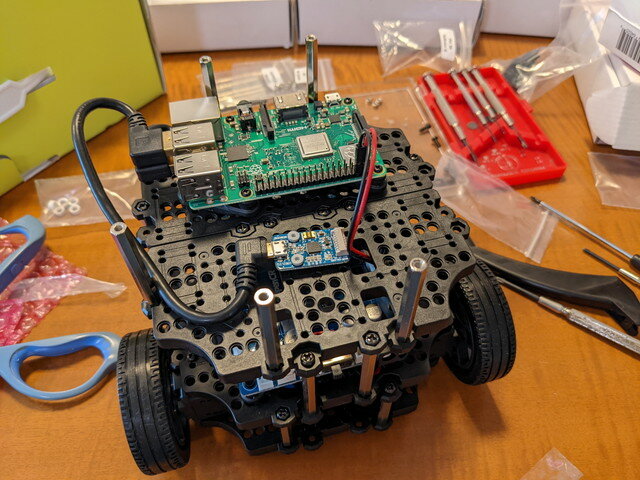
3rd LayerにRaspberry Pi 3B+を載せて合体します。
4th Layerの組み立て
最後にLiDARを載せて完成です。(手前のネジを締め忘れていますが、あとで締めました)

次はROSのセットアップにはいります。(続く)