セクション
6 ページ目
Categories
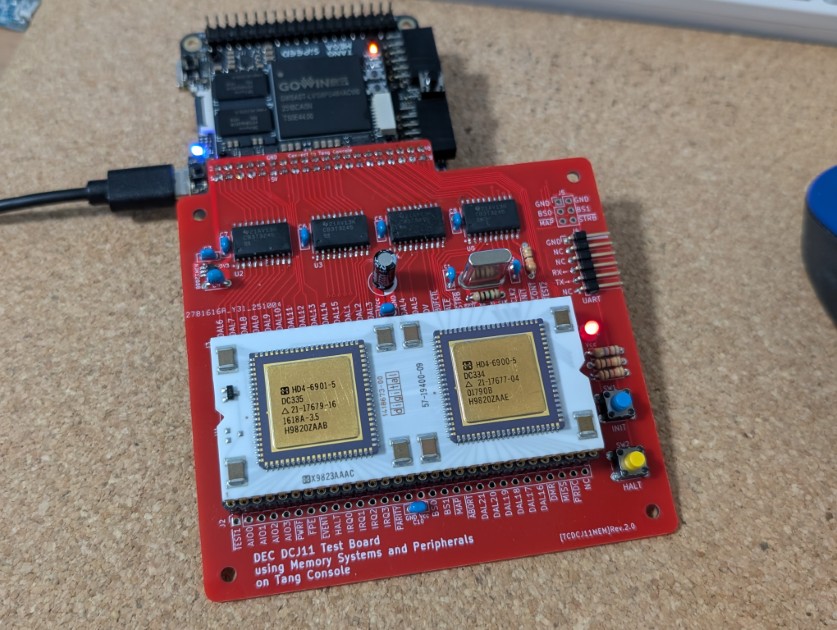
Retro Computing
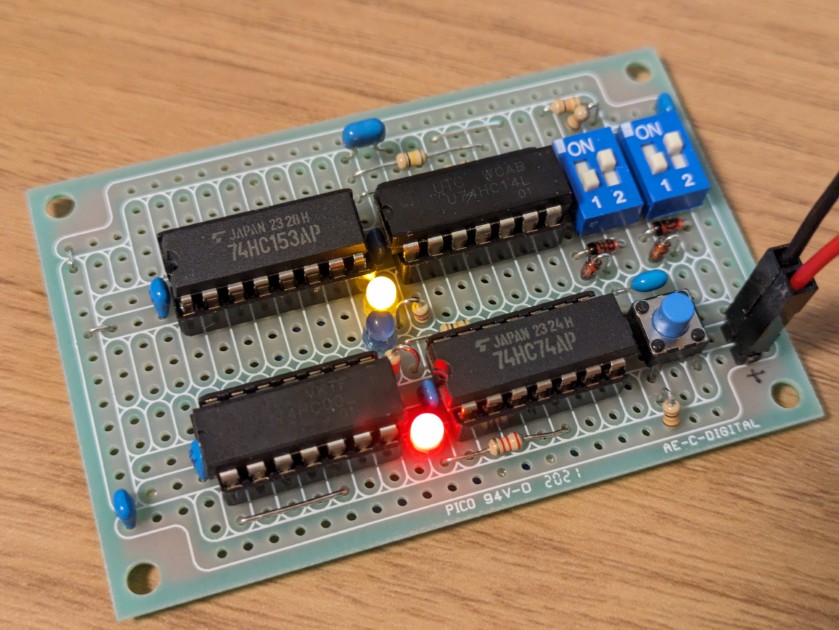
Electronics
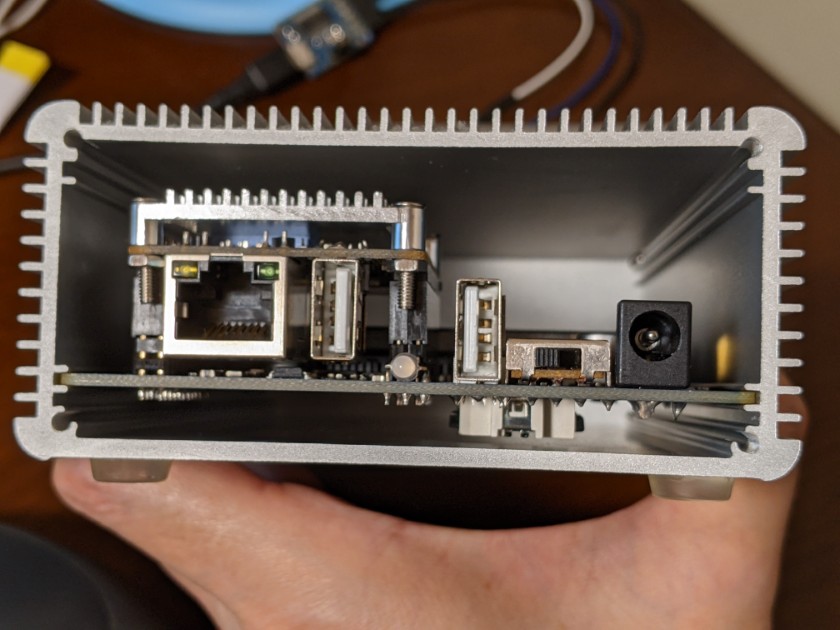
Server
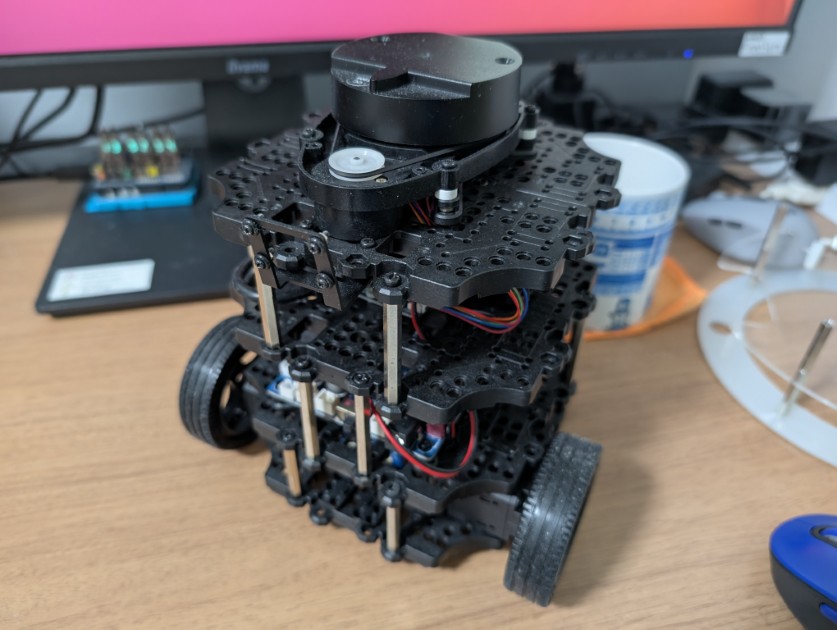
Robot
Event
Security