Robot
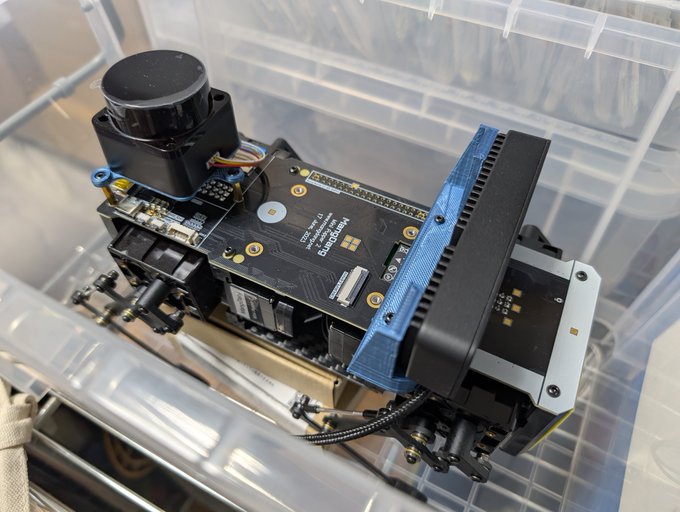
Mini pupper 2 object tracking
Robot
久しぶりのMini Pupper 2
Electronics
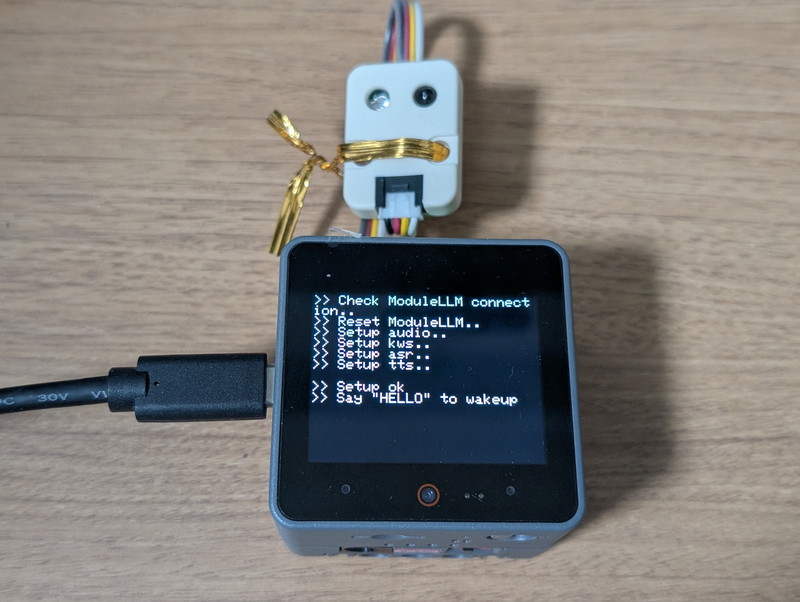
M5 Module LLMで音声制御リモコンを作ってみました
Electronics
ubuntuのadbでModule LLMに接続してみました
Electronics
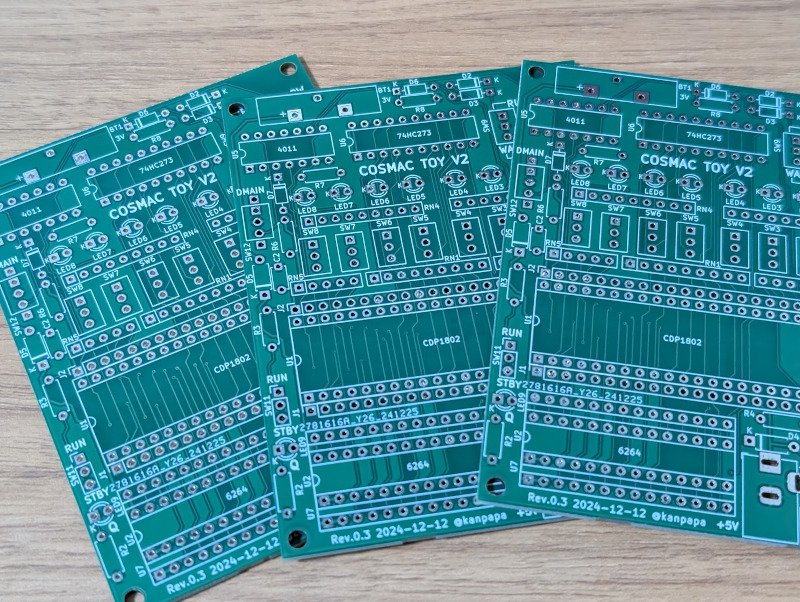
VFD時計を製作してみました
Event
プリント基板の頒布方法をいろいろ試してみました
1
11
12
13
207
ページにジャンプ
(1 - 207)
ジャンプ
Enter
Enter キーでジャンプ