第41回(4月3日)ではArduinoからルンバに対してコマンドを送ってモーターを動かしました。第42回(4月17日)はルンバのセンサーデータをArduinoで読み取ることを試してみます。
ルンバから読み取れるデータ
ルンバにはいろいろなセンサーが取り付けられています。障害物に接触したことを検知するバンパーやモーターの回転数を読み取るエンコーダー、各種スイッチが押されたかを読み取るなどが考えられます。
今回はモーターの回転数をエンコーダーという仕組みで読み取ります。モーターに電流を流すとモーターが回転します。しかし、本当に回転しているのかはモーター側ではわかりません。もし何かに引っかかってモーターが回らない状態になっているにも関わらず、モーターに電流を流し続けるとモーターが焼けてしまうかもしれません。このため想定通りにモーターが動いているかを検知する仕組みが必要になるのです。
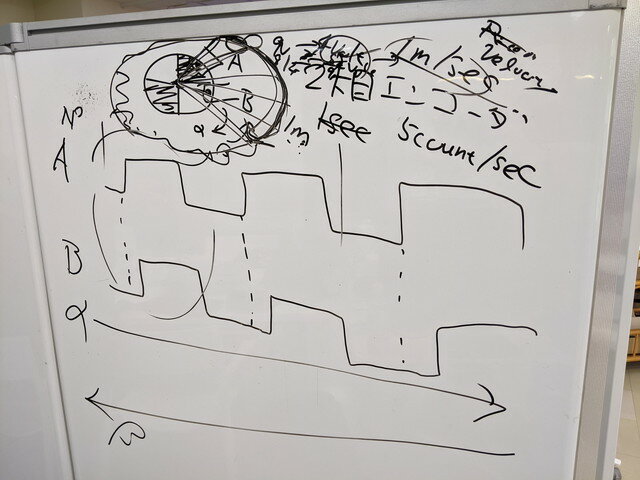
エンコーダーの仕様を確認
仕様を確認しようと、仕様書を探したところ、500系のルンバ用のマニュアルと、600系のマニュアルがありました。今回入手したルンバは600系なので600系の仕様書を使うことにします。細かくは確認していませんが、若干異なる部分がありそうです。
- iRobot® Roomba 500Open Interface (OI) Specification
- iRobot® Create® 2 Open Interface (OI)Specification based on the iRobot® Roomba® 600
エンコーダを読み取るための仕様がみつかりました。
ルンバから情報を取得する場合は、以下のコマンドを送るようです。
- Sensors Opcode: 142 Data Bytes: 1
このコマンドのあとに取得するデータの種類をPacket IDで指定します。
- Serial sequence: [142] [Packet ID]
Packet IDの仕様によると、左側と右側で別々に値がとれるようです。
| Packet ID | 取得できるData | |
| Left Encoder Counts | 43 | 符号付2バイト |
| Right Encoder Counts | 44 | 符号付2バイト |
コマンドとPacket IDを送信すると、2バイトの符号付データが受信できるはずです。
さらに調べたところ参考となるWebサイトも見つかりました。
- ArduinoからRoombaをSoftware Serialで動かす
- iRobot create2 (Arduino-Roomba) create 2を動かす方法とエンコーダーの値を取得する方法についてまとめる
Arduinoのプログラム
ルンバ600の仕様書やWebサイトの情報からArduinoのプログラムをつくりました。ソースはGitHub.comに置きました。
エンコーダーの値を読み取ってみる
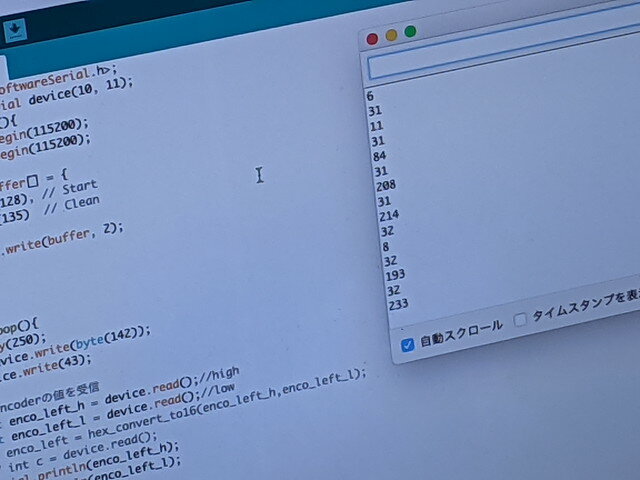
ルンバに接続したArduinoでプログラムを動かして、モーターの軸を手で回転させてみます。
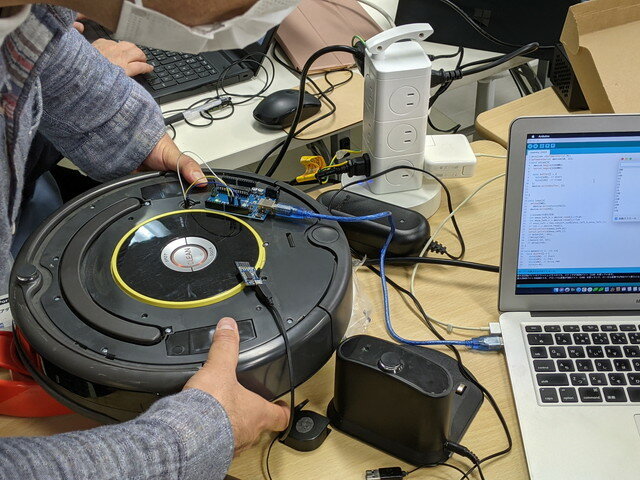
少し持ち上げて車輪を回すと数値が読み取れました。この値でどの程度回転したかを知ることができます。
今回はエンコーダーのデータだけ読み取ってみましたが、同様な手順で他のセンサーデータも読み取れるものと思われます。
次回はセンサーのデータを入力として、モーターを制御するようなことを試してみます。