Retro Computing
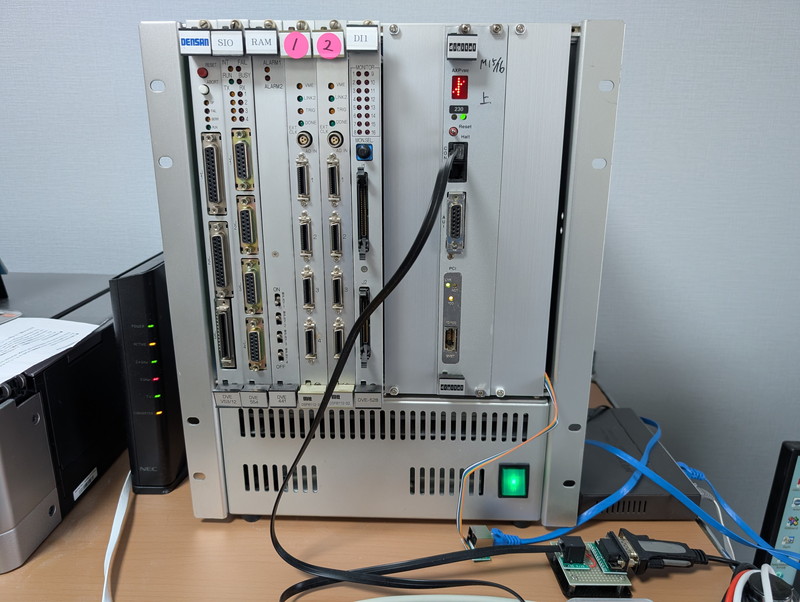
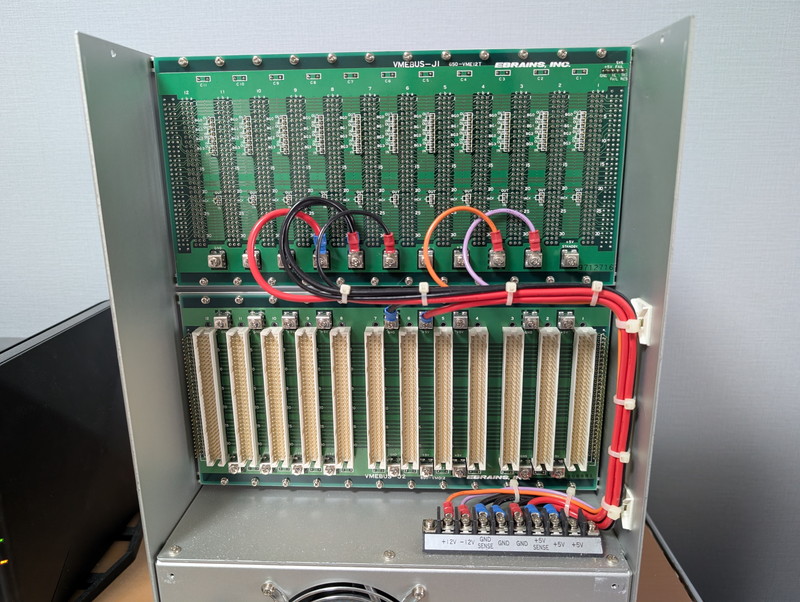
DEC AXPvme230で遊ぶ #12 VMEラックを整備する
Retro Computing
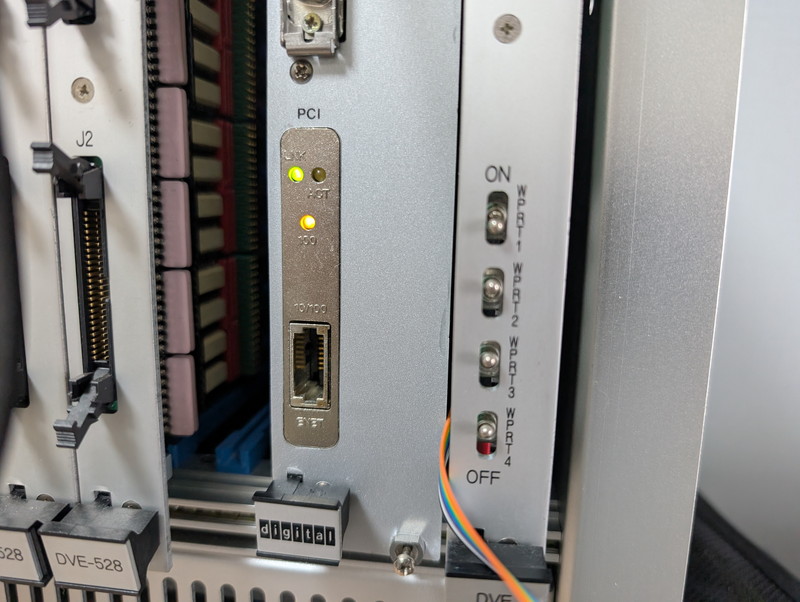
DEC AXPvme230で遊ぶ #11 PCI LANカードで100Mbpsにする
Retro Computing
DEC AXPvme230で遊ぶ #10 VMEラックに実装する
Retro Computing
DEC AXPvme230で遊ぶ #9 Dual Slot Breakoutボードの設計
Retro Computing
DEC AXPvme230で遊ぶ #8 インターネットに接続する
Retro Computing
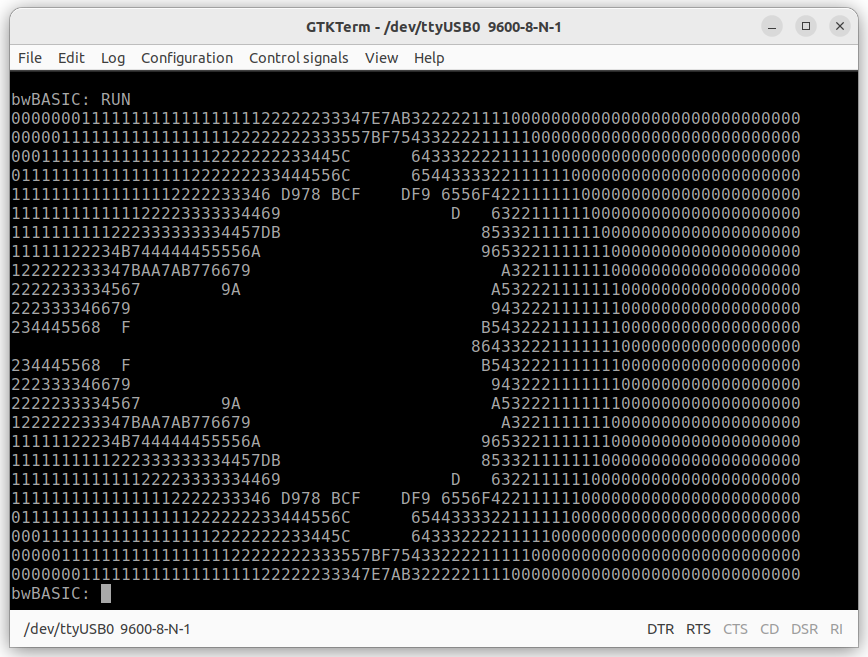
DEC AXPvme230で遊ぶ #7 NetBSD/alphaを起動する
1
2
3
4
208
ページにジャンプ
(1 - 208)
ジャンプ
Enter
Enter キーでジャンプ