書籍「AIロボット入門」を読みながらマニュピレーターをシミュレーションで試しましたが、実際にマニュピレーターを動かしてみたくなりました。探してみたところキットがありました。
Webを検索したところ、実際に動作させているかたもいるようでしたので、購入して試してみることにしました。念のためですが、ROSをサポートしているものではありません。そこは自分で作る必要があります。
ロボットアームDIYキットの入手
到着したDiyStudio 6自由度ロボットアームDIYキットです。

袋詰めのパーツだけという簡易包装ですが、これで十分です。組み立てマニュアルは紙1枚だけでやや不安がありましたが、必要なことは書いてありそうでした。
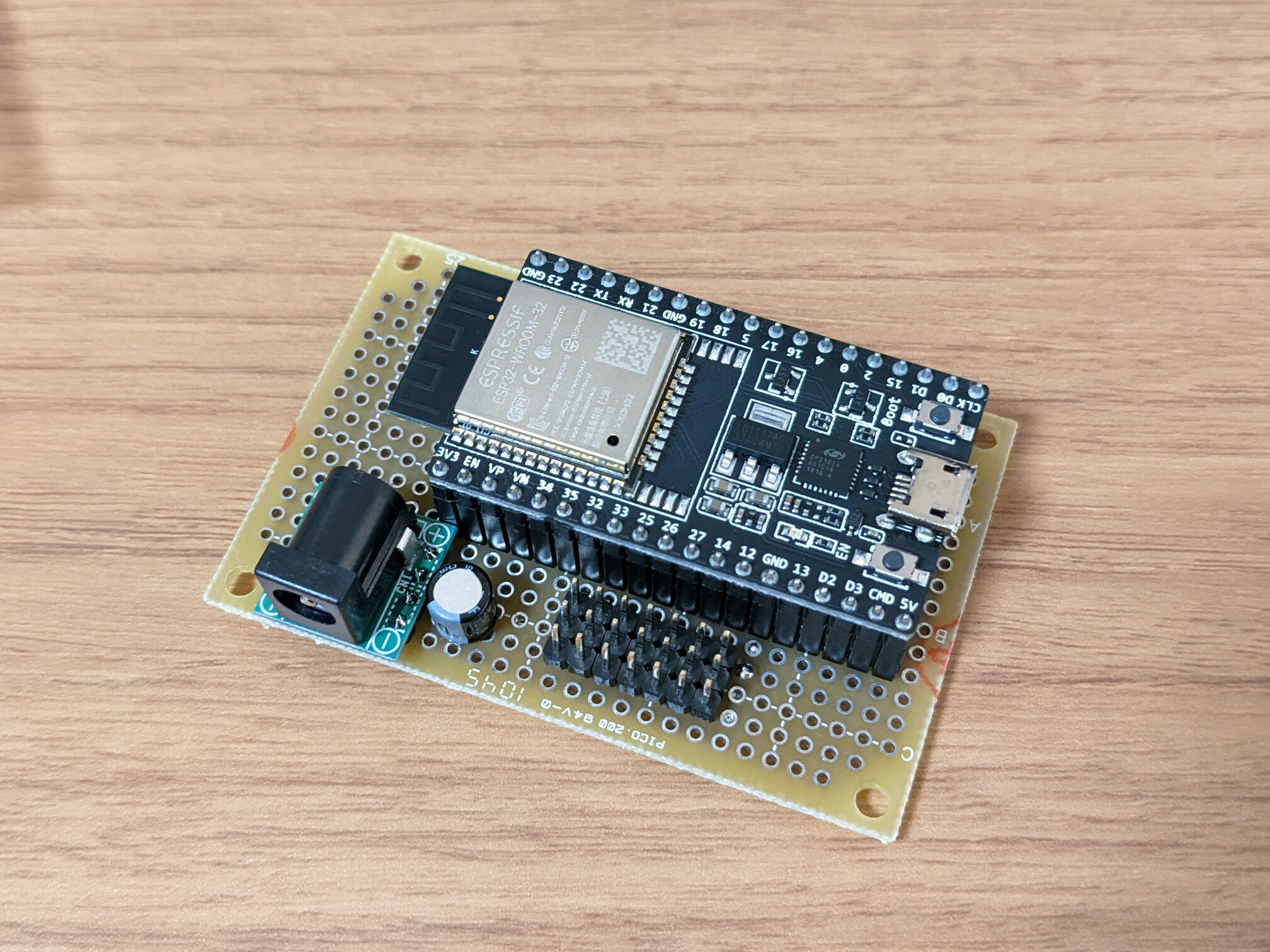
コントローラーの製作
本体を組み立てる前にまずはロボットアームを制御するための基板を製作することにしました。ESP32-DEVKITCを使用します。簡単な回路でブレッドボードでも大丈夫だとは思うのですが、サーボモーターをいくつも同時に動かすことになり、それなりの電流が流れると思われるためユニバーサル基板で製作しました。
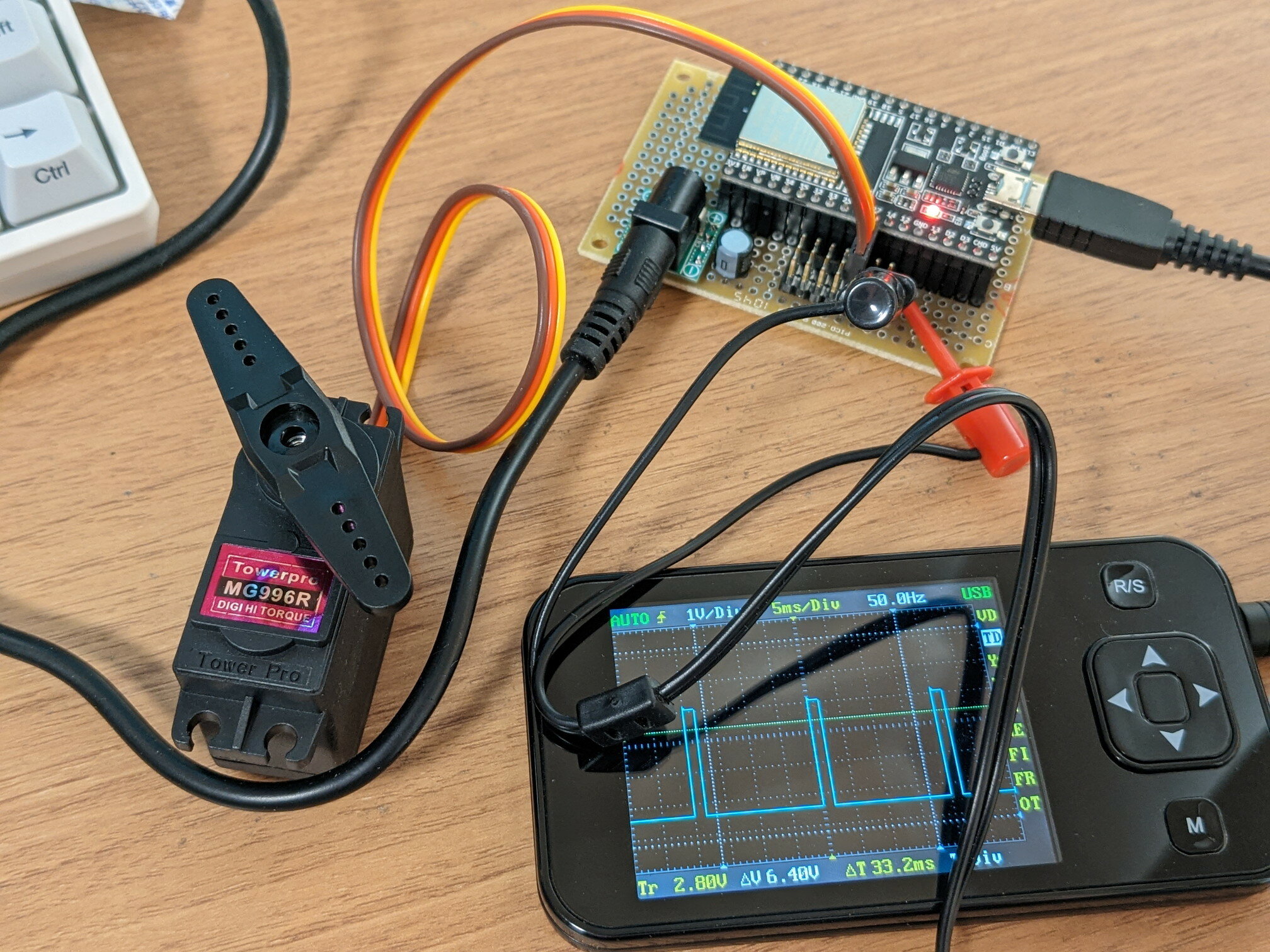
キットに入っているサーボモーターを1つ使用して動作確認を行いました。
YouTubeに動画をアップしておきました。
問題なく動作するようです。これでキットの6個のサーボモーターを制御することができそうです。
次回はロボットアーム本体の組み立てを行います。