 D-Robotics RDK
D-Robotics RDK D-Robotics RDK X3 をTurtleBot3に搭載してみました
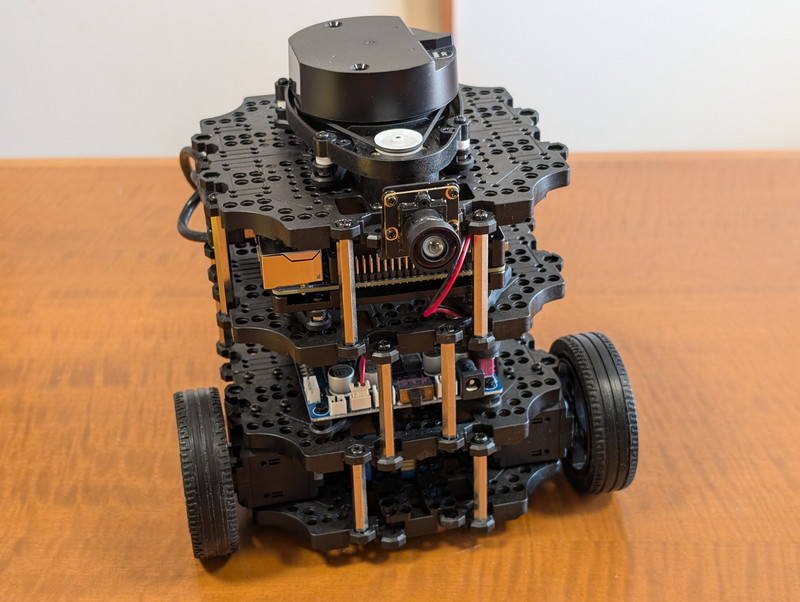
D-Robotics RDK X3を使っていろいろ試してみますが、机の上で走行できるコンパクトなロボット環境があると良いなということで、TurtleBot3にRDK X3を搭載してみました。TurtleBot3は標準ではRaspberry ...
D-Robotics RDK 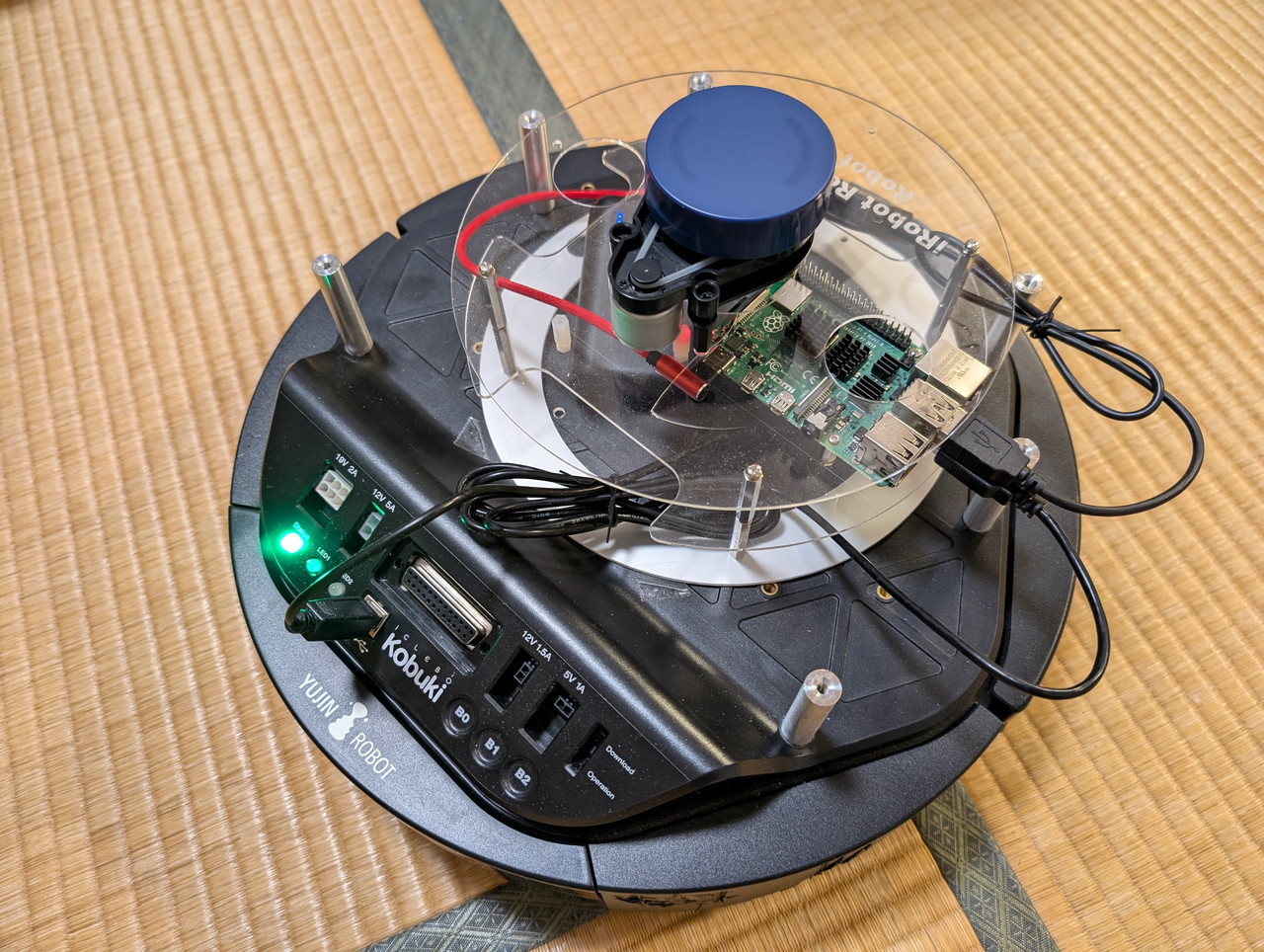 Turtlebot2
Turtlebot2  Turtlebot2
Turtlebot2  Turtlebot3
Turtlebot3  Robot
Robot