 Robot
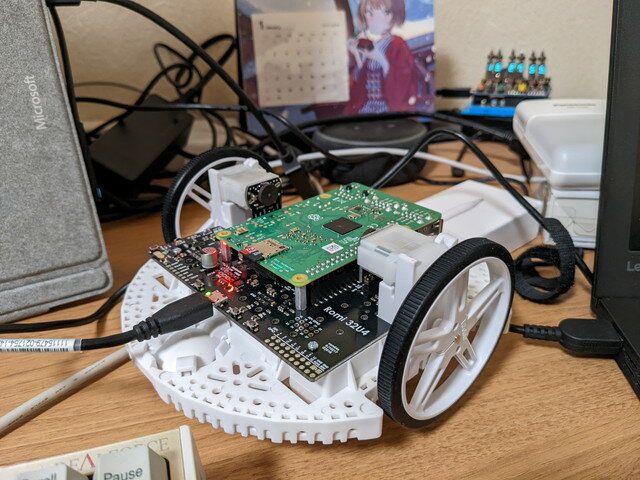
Robot Pololu Romi ロボットカーをROSで動かしてみました
Pololu RomiでROSにチャレンジPololu RomiをROSで動かしてみます。以下の記事を参考にしました。Introducing RomiPi: A ROS Package for the Pololu RomiソースはGitH...
Robot  Robot
Robot  Robot
Robot  Robot
Robot  Robot
Robot  Robot
Robot  Robot
Robot  Robot
Robot  Robot
Robot  Robot
Robot