 Turtlebot3
Turtlebot3 TurtleBot3がやってきた #5(Navigationで自律走行編)
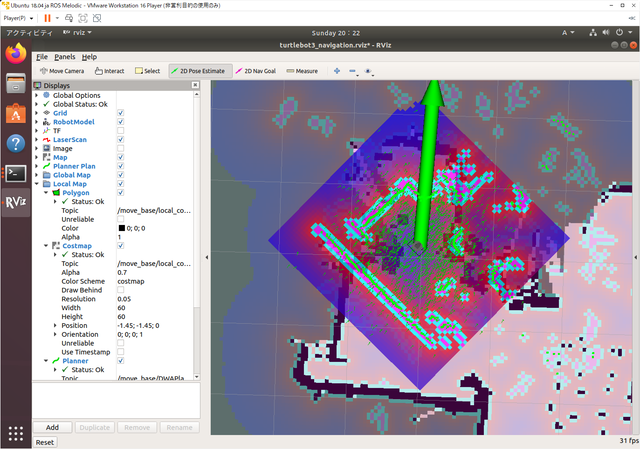
SLAMで作成した地図データを使って自律走行を行います。Navigationノードの実行以下の手順でNavigationノードを実行します。Ubuntu PCで新しくターミナルを開き、ROSマスターを動かします。$ roscore次に新しく...
Turtlebot3 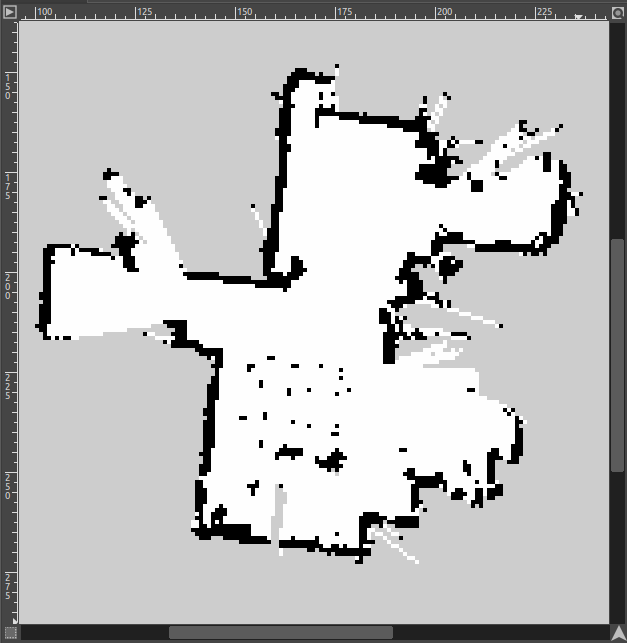 Turtlebot3
Turtlebot3  Turtlebot3
Turtlebot3  Turtlebot3
Turtlebot3  Turtlebot3
Turtlebot3