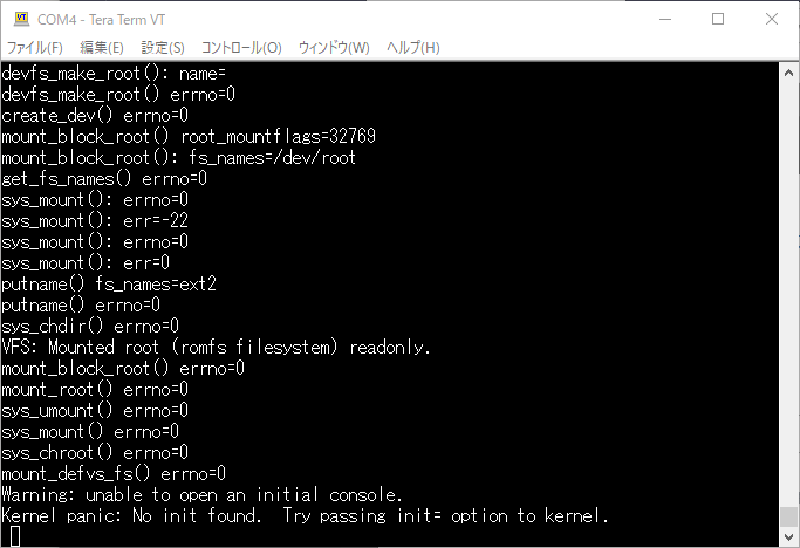
前回 initが読み込めないで停止する状態でしたが、まだ進捗がでていません。
printkで入出力パラメタやerrnoなどを表示して追っていますが、おかしいパラメタやerrnoもみつからずやや手詰まりになっています。
そこで、bootからinitの起動までソースをざっと追ってみることにします。
リセット直後のCPUの初期化ルーチン
リセットすると、$00000000にフラッシュメモリが配置されます。フラッシュメモリの$00000000から4バイトはスタックポインタの初期値、$00000004から4バイトはプログラム開始アドレスが書き込まれています。CPUはこれらの値を読み込み動き始めます。
リセット後に動作するプログラムは、arch/m68knommu/platform/68EZ328/ucsimm/crt0_rom.Sの_startから動きます。まずはステータスレジスタを設定しています。
.text
_start:
_stext: movew #0x2700,%sr
このあと、UARTの設定、PLLの設定を行い、PLLが安定するまで少しループで待ちます。
movew #0x0800, 0xfffff906 /* Ignore CTS */
movew #0x010b, 0xfffff902 /* BAUD to 9600 */
movew #0xe100, 0xfffff900 /* enable */
movew #0x2400, 0xfffff200 /* PLLCR */
movew #0x0123, 0xfffff202 /* PLLFSR */
moveq #0, %d0
movew #16384, %d0 /* PLL settle wait loop */
_pll_settle:
subw #1, %d0
bne _pll_settle
続いて、フラッシュメモリを$10000000に配置、DRAMは$00000000に配置するなどのCPUの設定を行います。
moveb #0x00, 0xfffffb0b /* Watchdog off */
moveb #0x10, 0xfffff000 /* SCR */
moveb #0x00, 0xfffff40b /* enable chip select */
moveb #0x00, 0xfffff423 /* enable /DWE */
moveb #0x08, 0xfffffd0d /* disable hardmap */
moveb #0x07, 0xfffffd0f /* level 7 interrupt clear */
movew #0x8000, 0xfffff100 /* FLASH at 0x10000000 */
movew #0x01ed, 0xfffff110 /* 8Meg, 16bit, enable, 0ws */
movew #0x8f00, 0xfffffc00 /* DRAM configuration */
movew #0x8667, 0xfffffc02 /* DRAM control */
movew #0x0000, 0xfffff106 /* DRAM at 0x00000000 */
movew #0x068d, 0xfffff116 /* 8Meg, 16bit, enable, 0ws */
moveb #0x40, 0xfffff300 /* IVR */
movel #0x007FFFFF, %d0 /* IMR */
movel %d0, 0xfffff304
moveb 0xfffff42b, %d0
andb #0xe0, %d0
moveb %d0, 0xfffff42b
movew #0x8000, 0xFFFFF102 /* CSB */
movew #0x0190, 0xFFFFF112 /* disable eth + DPRAM - KH */
変数領域の初期化
次はフラッシュメモリにあるデータセグメント(data)のデータをRAMにコピーします。これは初期値を持つ変数の値の内容になります。
/* Copy data segment from ROM to RAM */
moveal #__data_rom_start, %a0
moveal #_sdata, %a1
moveal #_edata, %a2
/* Copy %a0 to %a1 until %a1 == %a2 */
1: movel %a0@+, %a1@+
cmpal %a1, %a2
bhi 1b
続いて初期値を持たない変数のエリア(bss)を0で埋めます。
moveal #_sbss, %a0
moveal #_ebss, %a1
/* Copy 0 to %a0 until %a0 == %a1 */
1:
clrl %a0@+
cmpal %a0, %a1
bhi 1b
グローバル変数の値を設定し、スタックポインタを設定します。
movel #_sdata, %d0
movel %d0, _rambase
movel #_ebss, %d0
movel %d0, _ramstart
movel #__ramend-CONFIG_MEMORY_RESERVE*0x100000, %d0
movel %d0, _ramend
movel #__ramvec, %d0
movel %d0, _ramvec
/*
* load the current task pointer and stack
*/
lea init_task_union,%a0
movel %a0, _current_task
lea 0x2000(%a0),%sp
カーネルの起動
最後にカーネルを動かします。戻ってきたら再度動かすように無限ループになっています。
1: jsr start_kernel
bra 1b
ここから先はLinux kernelに入ります。以降はC言語で書かれているのでやや読みやすくなります。(続く)