おおたfabさんでは、「素人でもロボットをつくりたい」という勉強会を定期的に行っています。前回はLiDARを使って地図の作成を行いましたが、はっきりとした地図はできませんでした。もう一度地図作成にチャレンジします。
ルンバにLiDARを固定
前回はLiDARをルンバに載せただけだったので、動いているうちに位置がずれてしまっていました。今回は図面から穴をあけた段ボールにLiDARをねじ止めし、それをビニールテープで固定しました。これで位置がずれることはなくなりました。

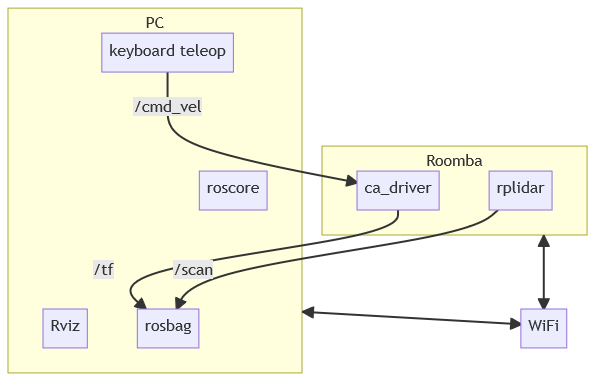
ROSノードの構成を変更
これまではRaspberry Pi 4ですべてのノードを動かしていましたが、turtlebot3と同様にRaspberry Piでは最低限のドライバだけ動かして、データの収集や可視化はPCで行うように変更しました。
Roombaドライバを変更
これまではGazeboも動作するRoboticaUtnFrba/create_autonomyを使用していましたが、以下の記事で実機動作が確認されているgoodfield55さん改良版のRoombaドライバを使用してみました。
地図を取得してみる
テスト環境のIPアドレスは以下のようになっています。
- Ubuntu PC 192.168.0.34
- Raspberry Pi 192.168.0.63
準備
1. Ubuntu PCにログイン
2. Ubuntu PCの環境変数の確認
export ROS_MASTER_URI=http://192.168.0.34:11311
export ROS_HOSTNAME=192.168.0.343. Raspberry Piにモバイルバッテリをつないで起動
4. Ubuntu PCからRaspberry Piにログイン
ssh [email protected]5. Raspberry Piの環境変数の設定
export ROS_MASTER_URI=http://192.168.0.34:11311
export ROS_HOSTNAME=192.168.0.63トピックの記録
1. Raspberry Piの設定
2. rplidarのlaunchファイルでlaserとbase_footprintのリンクをpublishする設定を追加する。
~/catkin_ws/src/rplidar_ros/launch/rplidar.launch に以下の行を追加
3. Ubuntu PCでroscoreを起動する。
roscore4. Ubuntu PCでrosbagで記録する。
rosbag record -a5. RaspberryPiにsshでログインしルンバのドライバを起動する
roslaunch ca_driver create_2.launch6. RaspberryPiにsshでログインしRPLiDARのノードを起動する。
roslaunch rplidar_ros rplidar.launch7. Ubuntu PCでキーボードでルンバを動かして、地図情報を取得する。(/create1/cmd_velを/cmd_velに変更したもの)
roslaunch ca_tools keyboard_teleop2.launch8. Ubuntu PCでbagデータを記録しているターミナルでCtrl-Cを入力し記録を停止する。
取得したbagデータでのSLAMの確認
1. すべてのROSのノードを停止(roscoreも)し、不要なtopicが流れない状態にする。
2. Ubuntu PCでroscoreを起動する。
roscore3. Ubuntu PCでgmappingを起動する。
rosparam set use_sim_time true
rosrun gmapping slam_gmapping4. Ubuntu PCでRvizを起動する
rosrun rviz rviz※RvizのUIでMap(/map), LaserScan(/scan), TFをaddする。
5. Ubuntu PCで取得したbugデータを再生する。
rosbag play --clock 2022-03-06-12-20-16.bag6. Ubuntu PCで再生が終わったらmap情報を取得する。
rosrun map_server map_saver -f my_map37. gmappingをctrl-cで停止する。
今回生成できた地図
まずまずの出来ではないかと思います。
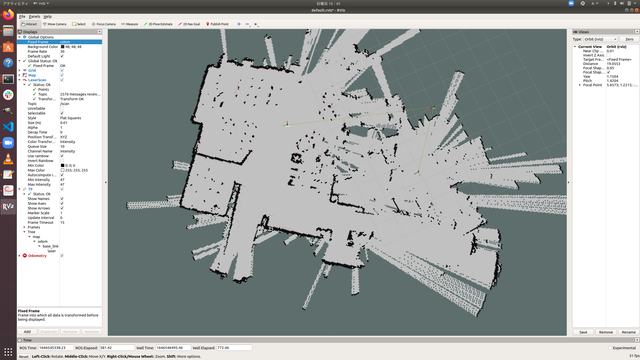
生成した地図の確認
地図のデータをmap_serverで配信します。
$ rosrun map_server map_server my_map3.yaml
[ INFO] [1646556115.623077211]: Loading map from image "my_map3.pgm"
[ INFO] [1646556115.685095565]: Read a 4000 X 4000 map @ 0.050 m/cellこの状態でRvizでmapが表示されることを確認しました。
次回はナビゲーションにチャレンジです。