
ルンバのROSパッケージは以下のものを使用していますが、IMUをサポートしているようです。
IMUとしてMPU9255が使えるようですので、以下のドキュメントにしたがってRaspberry Piに接続してみることにしました。
MPU-9255を入手
今回入手したIMUのモジュールです。
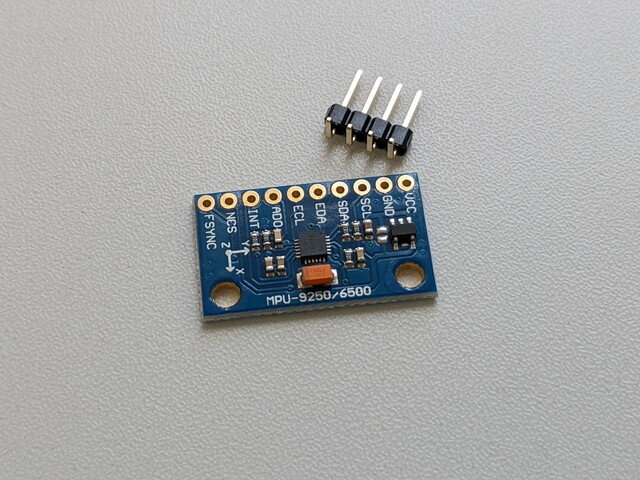
基板にはMPU-9250/6500と表示がありますが、i2cでデバイスIDを読み取ってみたところMPU-9255のようでした。
i2cでIMUを接続
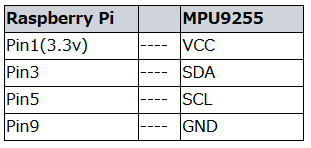
Raspberry PiとIMUはi2cで接続します。
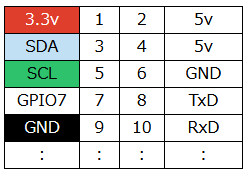
まずは、Raspberry Piのピン配置です。
Raspberry Pi とIMU(MPU9255)の結線図です。
まずはIMUにピンヘッダを半田付けし、コネクタ付コード4Pを接続します。
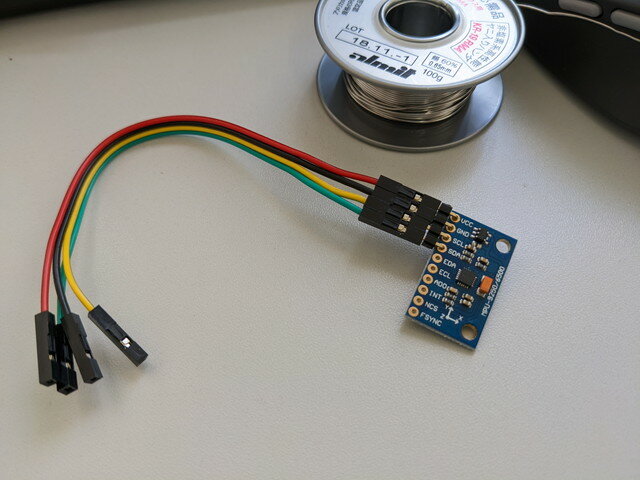
これをRaspberry Piに接続し、ルンバには写真のように実装しました。中心から少し外側にしていますので、回転時の遠心力がとりやすいかもです。

IMUの接続確認
i2cdetectを使って接続確認を行います。
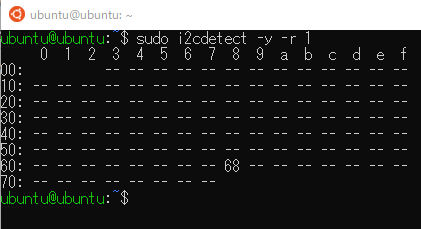
問題なくつながっているようです。別のテストプログラムも試してみました。
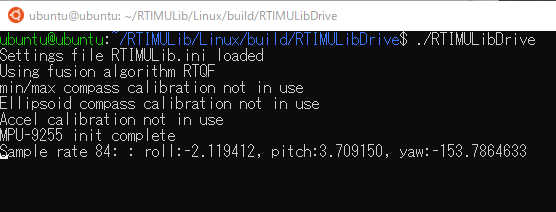
まだキャリブレーションを行っていませんが、ある程度の値は取れているようです。ルンバの向きや角度を変えると値が大きく変化します。
ROSドライバで動かしてみる
ca_bringup のlaunchファイルにIMUの有効・無効のパラメタがあります。これまではfalseにしていましたが、trueに変更します。
export IMU=true
roslaunch ca_bringup minimal2.launch
ca_bringupが問題なく起動できました。IMUも認識されているようです。
:
process[create1/imu_filter_madgwick-6]: started with pid [1896]
[ INFO] [1648881058.081380857]: [CREATE] "CREATE_2" selected
[ INFO] [1648881058.239620731]: Starting ImuFilter
[ INFO] [1648881058.301960556]: Using dt computed from message headers
[ INFO] [1648881058.302226506]: The gravity vector is kept in the IMU message.
process[create1/i2c_imu_node-7]: started with pid [1907]
[ INFO] [1648881058.407603101]: Imu filter gain set to 0.100000
[ INFO] [1648881058.407881329]: Gyro drift bias set to 0.000000
[ INFO] [1648881058.408114465]: Magnetometer bias values: 0.000000 0.000000 0.000000
[ INFO] [1648881058.454616624]: RTIMU Node for ROS
Settings file /home/ubuntu/catkin_ws/src/create_autonomy/sensors/ca_imu/config/create1.ini loaded
Using fusion algorithm RTQF
Using min/max compass calibration
Using ellipsoid compass calibration
Using accel calibration
MPU-9255 init complete
[ INFO] [1648881059.126926936]: First pair of IMU and magnetometer messages received.
:
RVizで表示してみる
RVizでIMUを表示すると大きな矢印が真上に表示されます。矢印は細かく振動していてどうやらLiDARの振動が伝わっているようです。
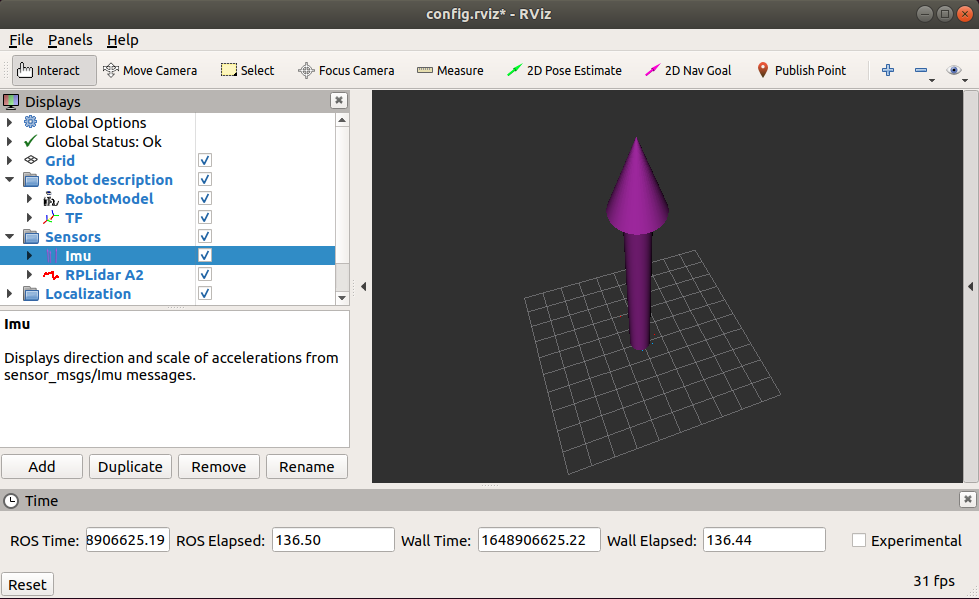
この状態でルンバを動かしてIMUの反応をみてみます。わかりにくいのでルンバの真下から見てみてみました。ルンバが動くと矢印の動きが大きくなるように見えます。
このようにIMUの情報からルンバの姿勢の情報が取得できるようになりました。