クラウドファンディングで申し込んでおいた Mini Pupper 2が到着しました。以前からMini Pupperには興味があったのですが、ROS2対応版のMini Pupper 2を待っていたところです。
実はクラウドファンディングではMini Pupper 2 Proを申し込んだのですが、こちら製品化に時間がかかっているので、Mini Pupper 2への変更をお勧めされ、途中でMini Pupper 2に変更したものです。
パーツの確認
到着したMini Pupper 2の段ボール箱を開けるとたくさんのパーツが入っていました。

これらのパーツを確認していきます。
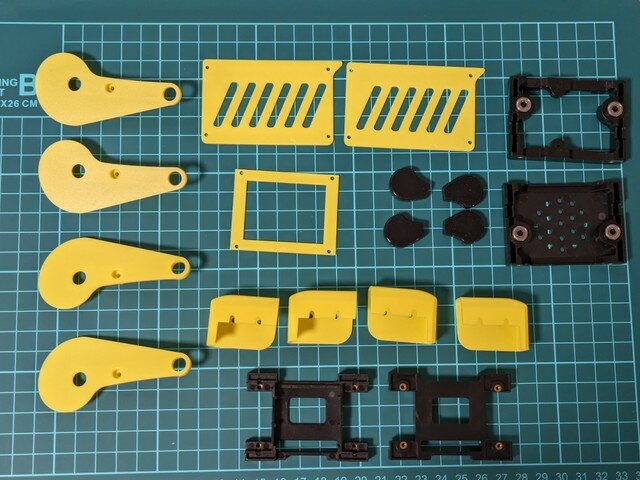
これらはボディのパーツでしょうか。
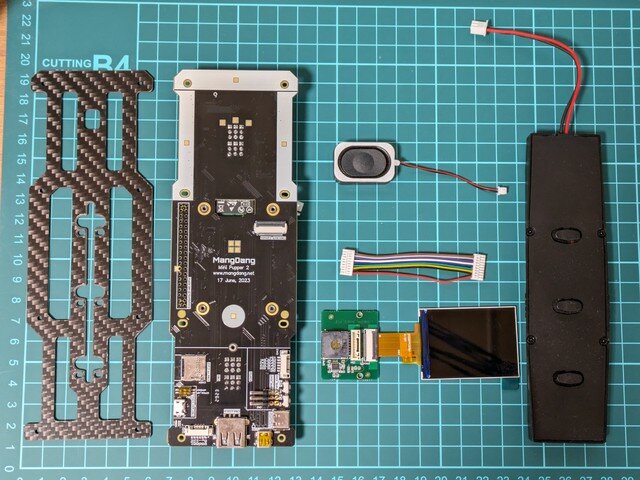
こちらはフレームと専用基板(裏側にRaspberry Pi CM4が取り付けられています)、表示基板、バッテリー、スピーカーです。
サーボモーターです。

こちらは足の部分のパーツでしょうか。

USBケーブルとmicroSDカードまでついていました。

一通りのパーツは揃っているように見えました。(が、これが間違いであることに組み立て中に気づきます。)
工具の準備
組み立て前に工具を準備しましょう。ネジの種類から以下の3つを用意しました。
- T6トルクスドライバー
- 4mmミニスパナ
- 精密ドライバー(+)

ドキュメント
Mini Pupper 2の組み立て動画がYouTubeで公開されていますので、これを見ながら組み立てました。
あとはMini Pupperのマニュアルも参考になります。足の機構はほぼ同じですので参考にすると良いです。
もちろんGitHubのリポジトリもあります。様々なリソースが管理されています。
これで準備は完了です。早速組み立ててみます。