Mini Pupper 2の組み立て準備ができましたので、実際に組み立ててみます。
ディスプレイユニットの組み立て
まずは顔となるディスプレイを作ります。
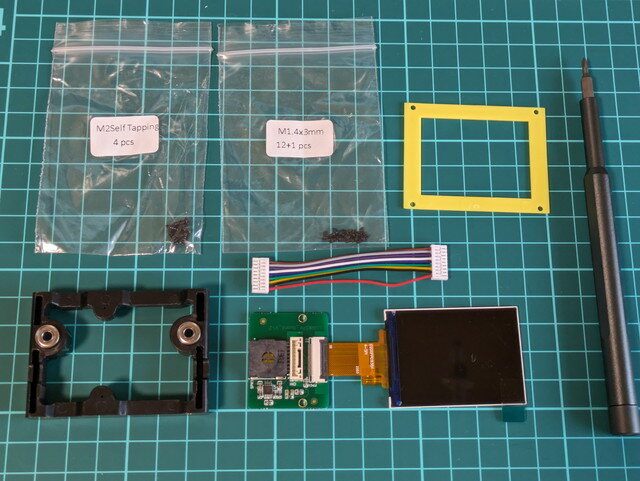
M2 self tappingネジで基板をフレームに固定します。
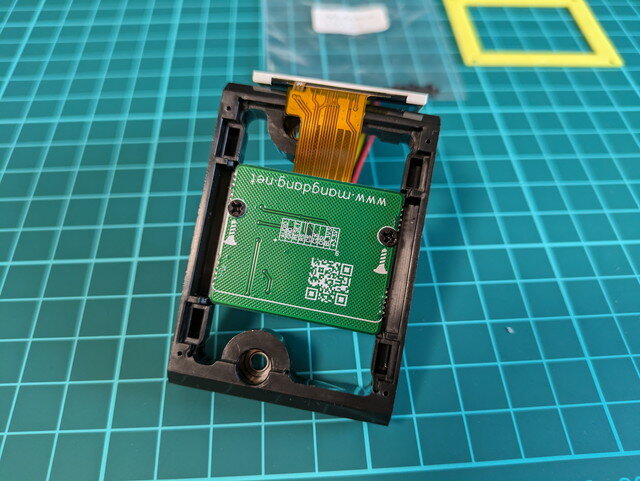
次に表示パネルをフレームで押さえて、M1.4✕3mmネジで固定して完成です。

これは比較的簡単に組み立てができました。
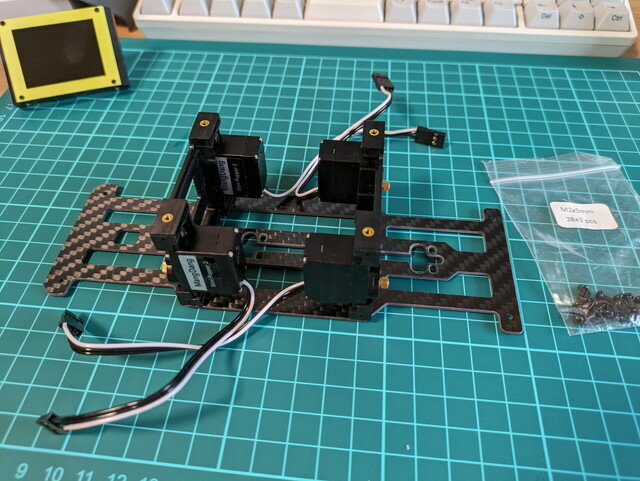
サーボモータをフレームに取り付け
次はサーボモータをフレームに取り付けます。

YouTubeの組み立て動画にあるドライバよりは写真のような先が長いT6ドライバをおすすめします。先が短いとサーボモータにあたってネジが斜めになってしまいます。

4個のサーボモーターがフレームに固定されました。
次はフレームに取り付けたサーボに取り付けるサーボユニットを組み立てるのですが、なぜかそれに必要なパーツがみあたりません。このような形のものです。

どうやら最初から入っていなかったようで、あわててdiscodeでパーツが不足していることを連絡しました。送っていただけるとのことですが、これ以降の本体の組み立てはパーツが届いてからになります。
到着までに時間がかかりそうなので、次は基板に取り付けられているRaspberry Pi CM4について眺めてみようと思います。