 D-Robotics RDK
D-Robotics RDK D-Robotics RDK X5をTurtleBot3に載せてみました
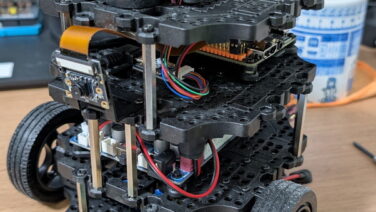
D-Robotics RDK X5をTurtleBot3に載せてみました。以前にRDK X3をTurtleBot3に載せたことはありますので基本的にはその手順で問題ないのですが、RDK X5での違いや気づいたところを中心にまとめました。ソフ...
D-Robotics RDK 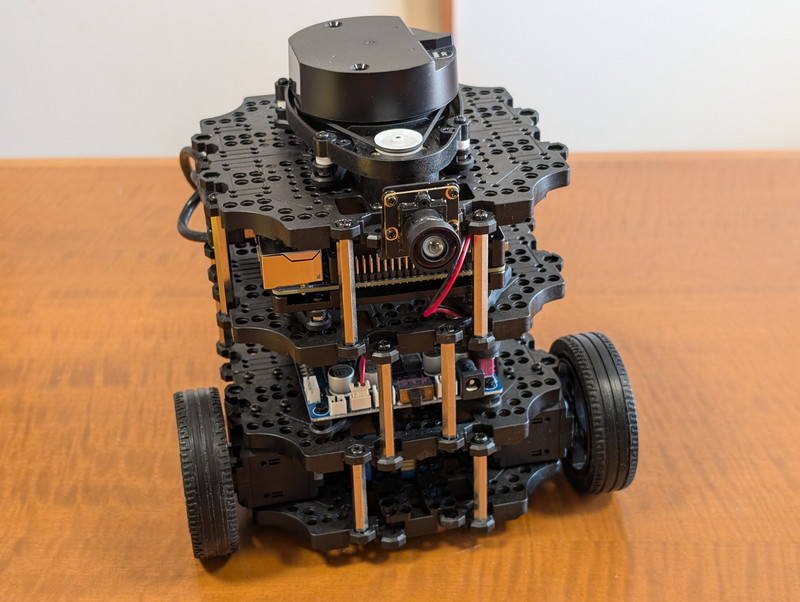 D-Robotics RDK
D-Robotics RDK  Turtlebot3
Turtlebot3  Turtlebot3
Turtlebot3  Turtlebot3
Turtlebot3  Turtlebot3
Turtlebot3  Turtlebot3
Turtlebot3