 Roomba
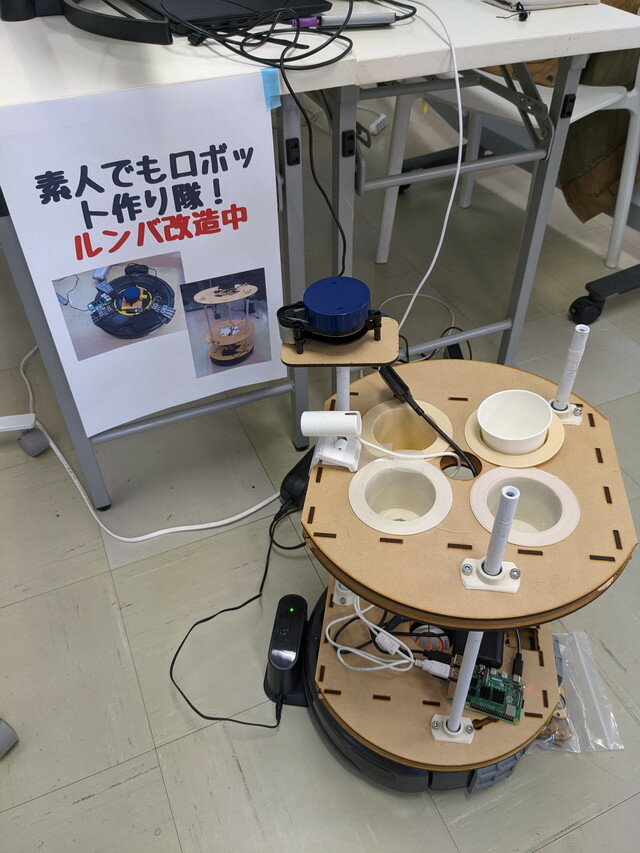
Roomba おおたfabオープンハウスでルンバロボットの自律走行を実演しました
おおたfabさんでは、「素人でもロボットをつくりたい」という勉強会を定期的に行っていますが、その成果発表ということで、10月30日に開催されたおおたfabオープンハウスでルンバロボットの走行デモを行いました。Raspberry Pi 4の再...
Roomba  Roomba
Roomba  Roomba
Roomba  Robot
Robot  Roomba
Roomba 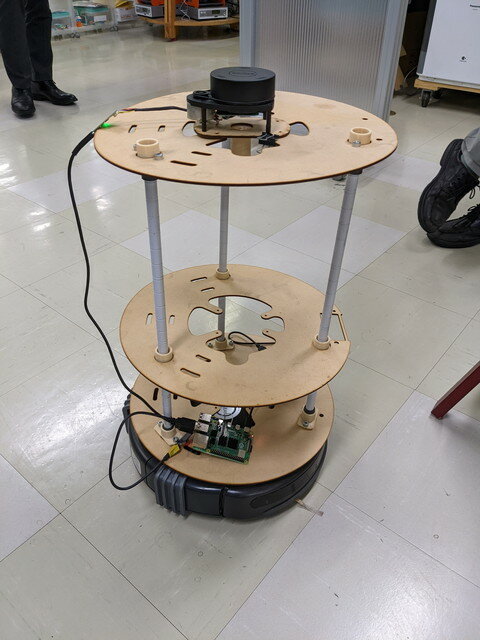 Roomba
Roomba  Roomba
Roomba 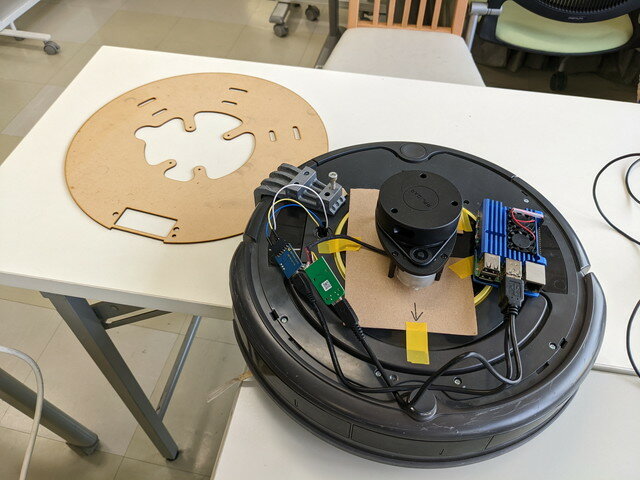 Roomba
Roomba  Robot
Robot  Robot
Robot