 COSMAC
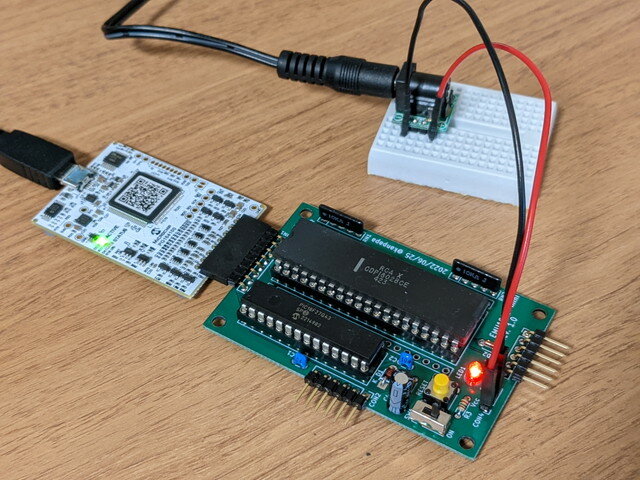
COSMAC EMU1802-miniが新ファームウェアで大幅に高速化されました
200KHzだったシステムクロックが1.79MHzに!GazelleさんよりEMU1802-miniの高速版ファームウェアをご提供いただきました。ソースコードの開発および公開に感謝いたします。これをV2.1GとしてGitHubのemu180...
COSMAC  Roomba
Roomba  Roomba
Roomba  Roomba
Roomba  Robot
Robot  COSMAC
COSMAC 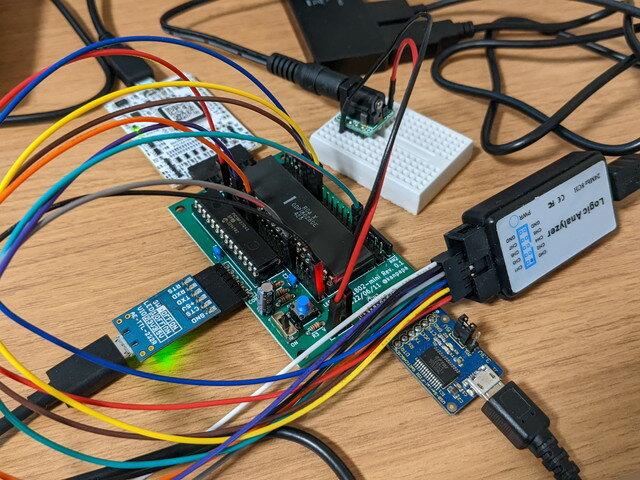 COSMAC
COSMAC 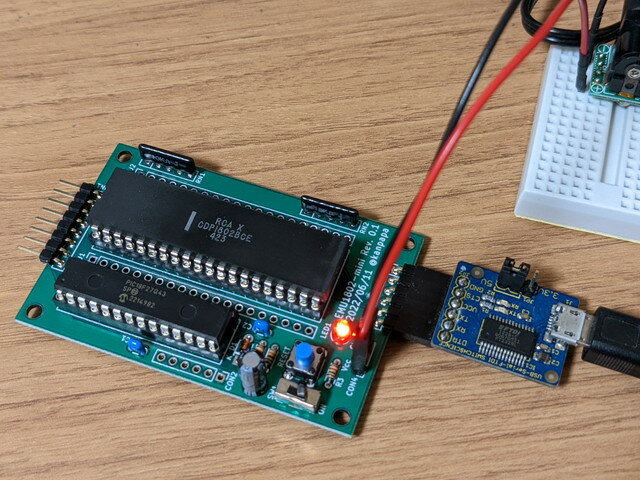 COSMAC
COSMAC  COSMAC
COSMAC  COSMAC
COSMAC