 Server
Server ブログサイトをAmazon Lightsailに移行しました
久しぶりにブログサイトを移行しました。移行先はAmazon LightsailというVPSです。サイト移行による変更点今回のサイト移行による変更点は以下の通りです。旧サイト新サイトクラウド基盤ConoHa VPS (1GB RAM, 2 v...
Server  ESP32
ESP32 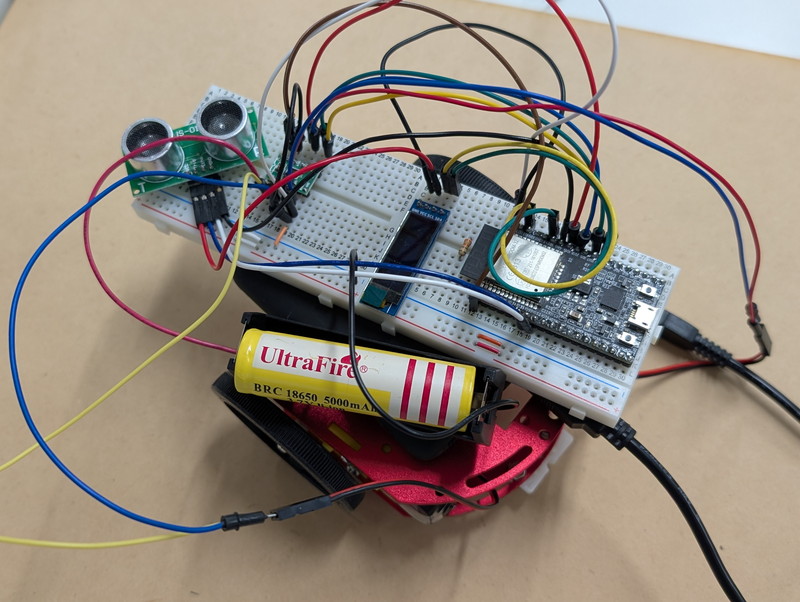 ESP32
ESP32  ESP32
ESP32  Electronics
Electronics 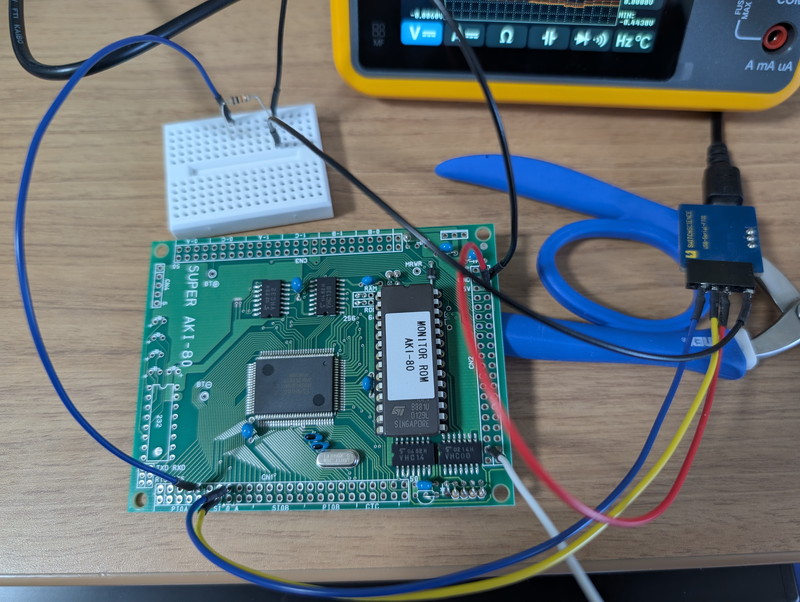 Z80
Z80  Electronics
Electronics 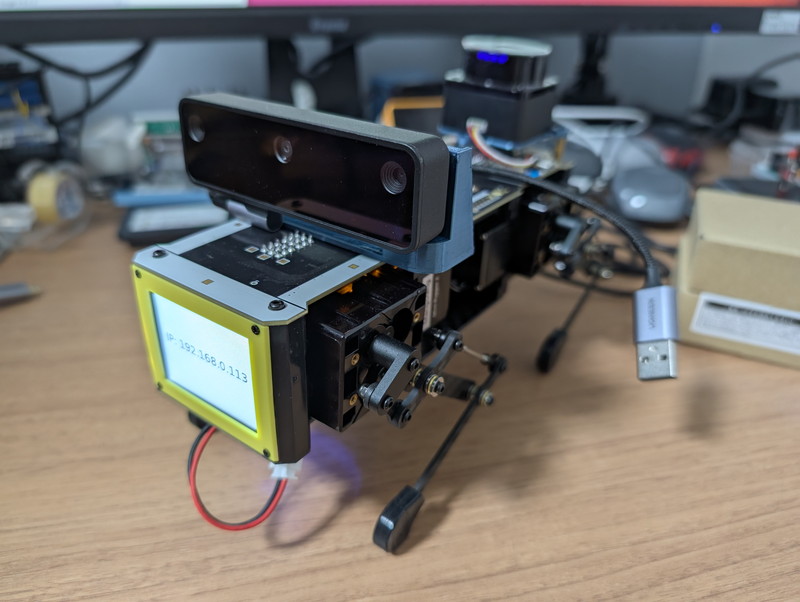 Mini Pupper 2
Mini Pupper 2 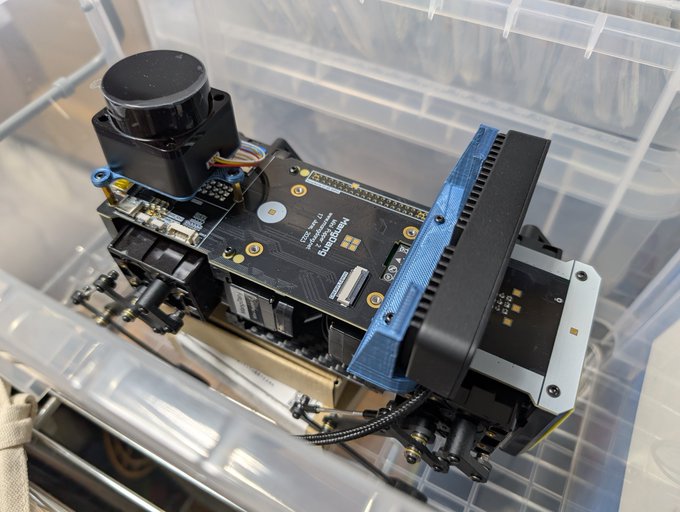 Mini Pupper 2
Mini Pupper 2