前回は簡単なpublisherを試してみましたが、今回はsubscriberをM5Stackで動かしてみます。環境は前回構築したものを使います。

今回はM5Stack Goを使いました。ROS2 Foxyの環境はVMWare Workstaion Player上のUbuntu 20.04 LTSです。
マイコン(M5Stack)側の設定
micro-ROSのサンプルプログラム(micro-ros_subscriber.ino)をM5Stack用に修正したものを使います。
サンプルプログラムではmicro_ros_arduino_subscriberというトピックを購読するようになっています。データの内容はInt32です。WiFiの設定のところは前回同様にWiFiのSSIDとパスフレーズとmicro-ROS-Agentが動作するPCのIPアドレスに書き換える必要があります。
作成したソースコードmicro-ros_m5stack_subscriber_wifi.inoはGitHubに登録しておきました。
PC(ROS2 Foxy)側の設定
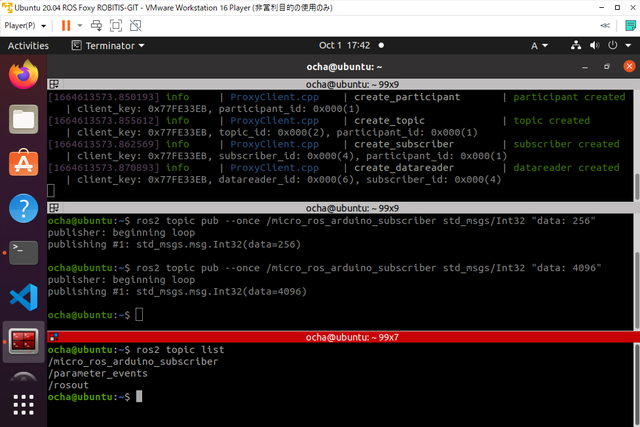
1.micro-ROS-Agentを実行する。
すでにAgentはビルドされていますので、Agentの実行のみを行います。なお、環境変数 ROS_DOMAIN_IDを設定していると動作しませんので、unset ROS_DOMAIN_ID で環境変数を削除してください。
ros2 run micro_ros_agent micro_ros_agent udp4 --port 8888
2.トピックを発行します。
ROS2の標準ツールでトピックを発行します。
ros2 topic pub --once /micro_ros_arduino_subscriber std_msgs/Int32 "data: 256"
動作確認
発行したトピックの値がM5Stackの画面に表示されました。
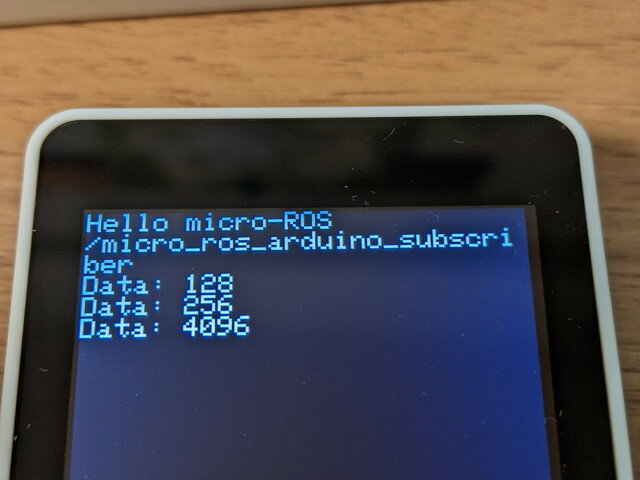
これで基本的なpub/subの動作は確認できました。