前回はSLAMで環境地図を作成しました。今回はこの環境地図の情報を使って自律走行を行います。ROS2ではNavigation 2と呼んでいます。今回はTurtlebot3用のNavigation 2パッケージを使用します。
環境地図を用意する
前回SLAMで作成した地図です。
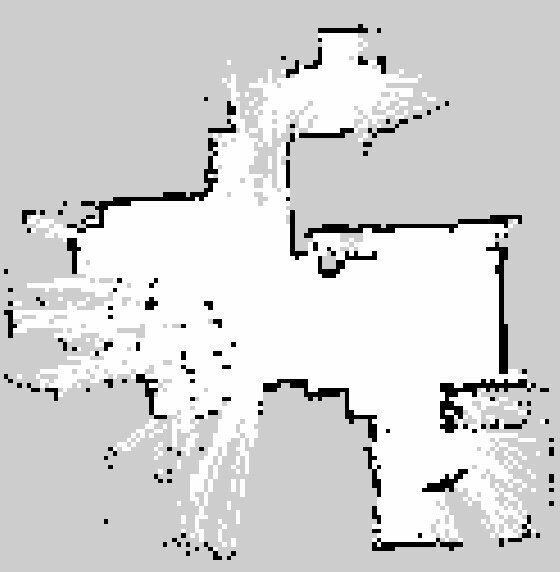
この地図はmap.pgmとmap.yamlという2つのファイルでできています。このファイルをホームディレクトリに用意します。
自律走行を行ってみる
自律走行(ナビゲーション)は以下の手順で行います。
1. ルンバをBringupしておきます。
2. 以下のコマンドでNavigation2を動かします
export TURTLEBOT3_MODEL=burger ros2 launch turtlebot3_navigation2 navigation2.launch.py use_sim_time:=True map:=$HOME/map.yaml
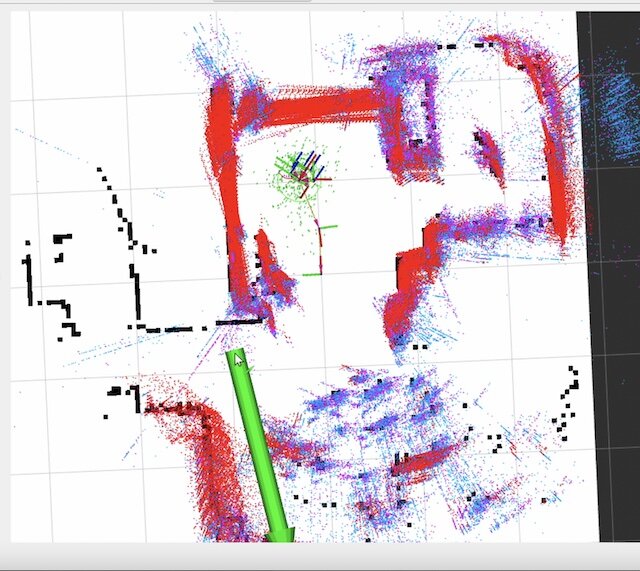
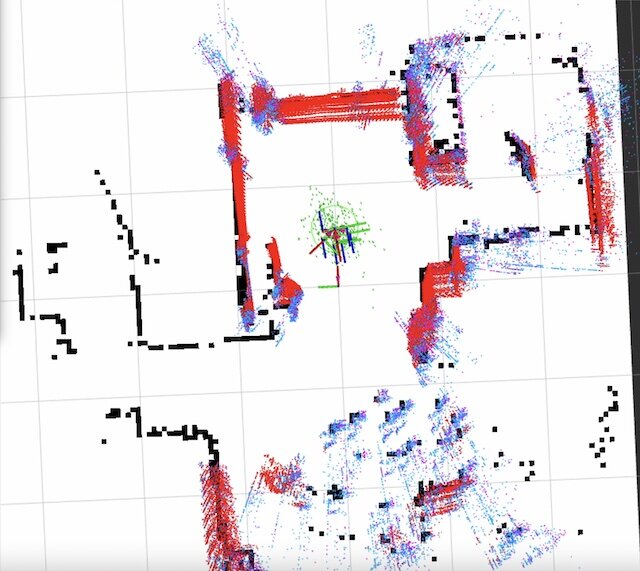
3. Rviz2が起動するので、2D Pose Estimateで現在のルンバの位置と向きを設定します。読み込んだ地図とレーザースキャンのマークがなるべく近くなるように調整してください。
4. ルンバの周りの緑色の小さい矢印が表示されます。
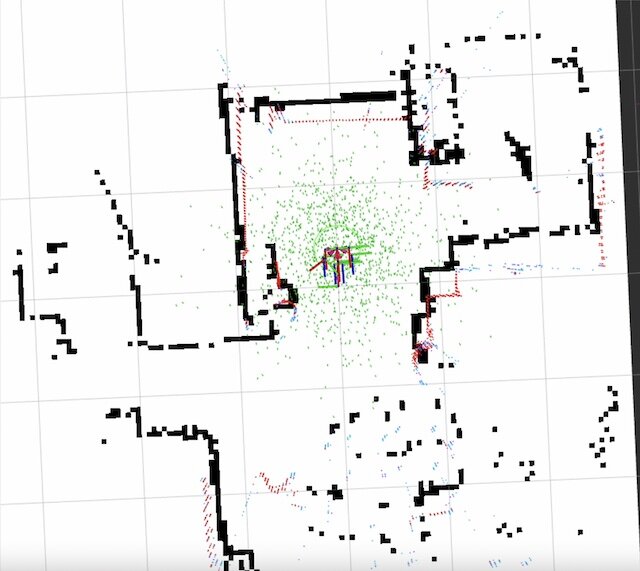
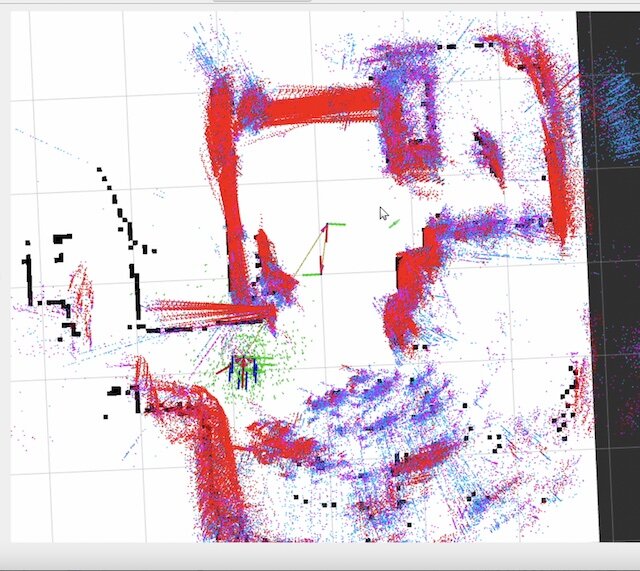
5. 以下のコマンドを実行し、キーボード操作でルンバを少し動かします。ゆっくり回転すると良いかもしれません。緑色の小さい矢印がルンバ周辺に集束してきます。
export TURTLEBOT3_MODEL=burger ros2 run turtlebot3_teleop teleop_keyboard
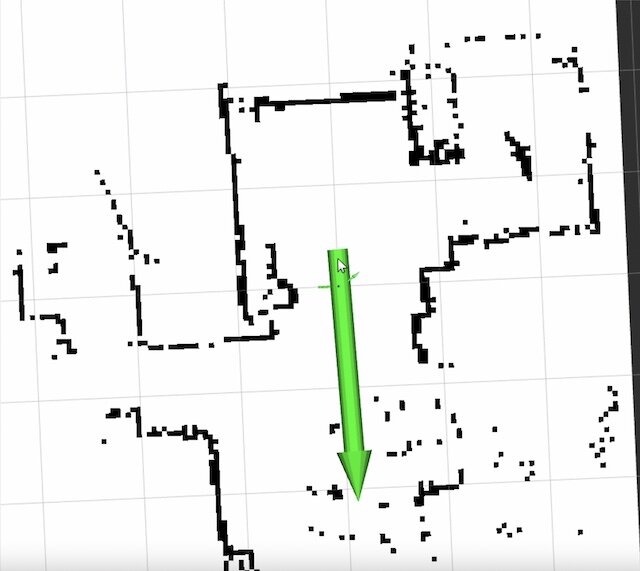
6. 緑色の小さい矢印がある程度集束したところで、2D Goal Poseでルンバの目的地と向きを設定します。
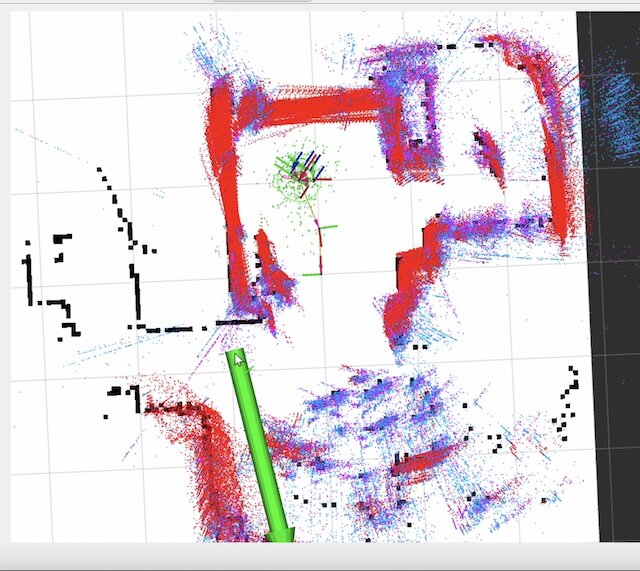
7. 目的地までの経路計画が表示されます。
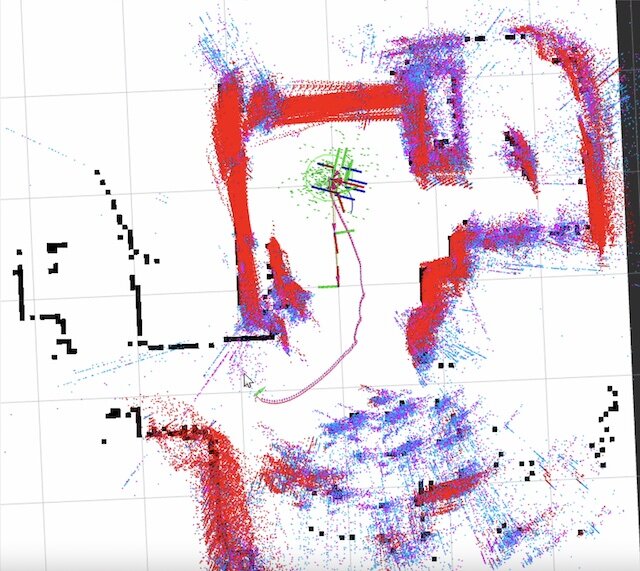
8. 経路計画に沿ってルンバが目的地まで走行します。
自律走行の様子
実際の自律走行の様子をYouTubeにアップしておきました。
これで一通りの動作が確認できました。
今回は狭い部屋の中での実験でしたので、もう少し広い場所(例えば、おおたFabさん)で自律走行を試して、各種パラメタをチューニングしていきたいです。

