 COSMAC
COSMAC COSMAC TOY V2で2025年の書き初めをしてみました
あけましておめでとうございます。去年はルンバで2024年の年越しカウントダウンをしてみましたが、今年は何をしようかなと考えていたところで、ちょうどCOSMAC研究会で開発中のCOSMAC TOY V2でPOV(Persistent Of V...
COSMAC  3Dプリンタ
3Dプリンタ  RDK X3
RDK X3  RDK X3
RDK X3  RDK X3
RDK X3  RDK X3
RDK X3  Nano Pi NEO
Nano Pi NEO  RDK X3
RDK X3  RDK X3
RDK X3 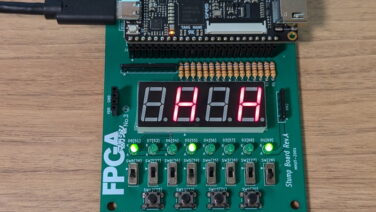 FPGA
FPGA