 Roomba
Roomba ルンバに慣性計測ユニット(IMU)を取り付けてみました
ルンバのROSパッケージは以下のものを使用していますが、IMUをサポートしているようです。 IMUとしてMPU9255が使えるようですので、以下のドキュメントにしたがってRaspberry Piに接続してみることにしました。 MPU-925...
Roomba 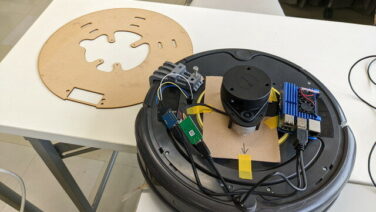 Roomba
Roomba  Roomba
Roomba  Roomba
Roomba  Roomba
Roomba 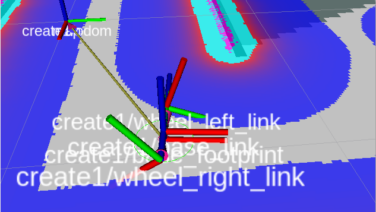 Roomba
Roomba  Roomba
Roomba  Roomba
Roomba  Roomba
Roomba  Roomba
Roomba