TurtleBot3のROS環境が整いましたので実際に走行させてみることにします。
PS4のDualShock4でTurtleBot3を動かす
これまではキーボードでTurtleBot3の移動方向や速度を指示していましたが、これだと少し扱いにくいです。そこでPS4のワイヤレスコントローラー DualShock4で操縦するように設定します。

以下の記事を参考にしました。
Bluetoothでの無線接続もできるようなのですが、VMWareを使っているためかUbuntuでのBluetooth接続がうまくできません。これはまた別の機会に試してみます。
必要なパッケージのインストールを行った後に、/dev/input/js0にDualShock4が接続されていることを確認して以下のコマンドを入力します。
$ rosrun joy joy_node
新しいターミナルを開き次のコマンドを入力します。
$ roslaunch teleop_twist_joy teleop.launch
あとは、PSボタンかSHAREボタンを押したままで、左スティックをゆっくり操作するとその方向にTurtleBot3が動きました。時々赤い文字でエラーが表示されますが、特に問題無く動くようです。
少し慣れが必要ですが、これでTurttleBot3の操縦がしやすくなりました。
SLAMで地図を作る
SLAM(Simultaneous Localization and Mapping)は現在の位置を推定して地図を作る技術です。TurtleBot3にはLiDARやエンコーダーといったセンサーが搭載されており、これらの情報を使って地図が作れます。この地図を使って、目的の場所まで自律走行が実現できます。
以下の手順でSLAMノードを実行します。
Ubuntu PCで新しくターミナルを開き、ROSマスターを動かします。
$ roscore
次に新しくターミナルを開き、TurtleBot3のRaspberry PiにログインしてBringupを動かします。
$ ssh [email protected] $ roslaunch turtlebot3_bringup turtlebot3_robot.launch
さらに新しいターミナルを開き、Ubuntu PCでSLAMノードを動かします。
$ export TURTLEBOT3_MODEL=burger $ roslaunch turtlebot3_slam turtlebot3_slam.launch
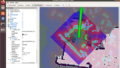
SLAMノードを動かすと、Rvizが表示されます。
さらに新しいターミナルを開き、先ほどのDualShock4のコントローラーが使えるようにします。この状態でDualShock4を操作して少しづつ空間を移動して地図を作っていきます。
一通り地図ができたところで、新しいターミナルを開き、次のコマンドを入力して地図を保存します。
$ rosrun map_server map_saver -f ~/map
生成された地図の確認
ホームディレクトリを見ると以下の2つのファイルが生成されています。

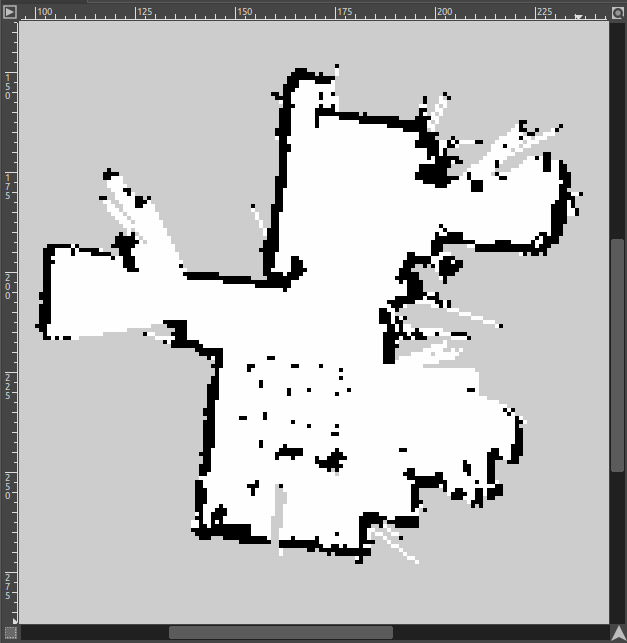
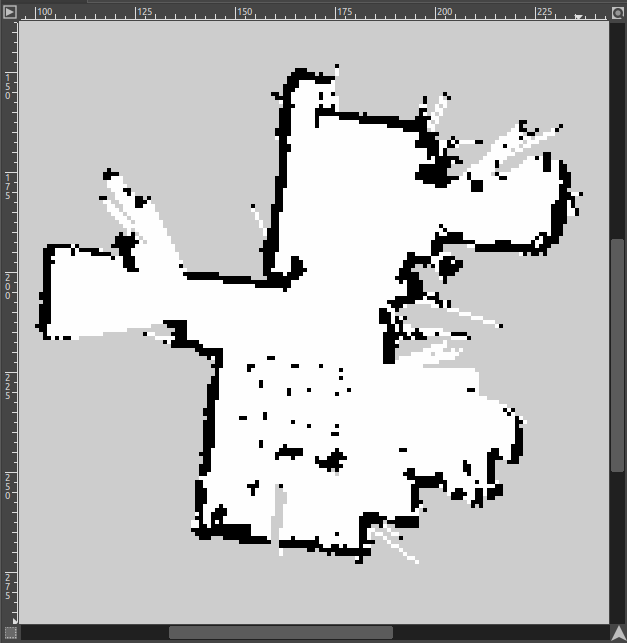
map.pgmは画像データなのでGIMPといった画像表示ツールですることができます。これが今回SLAMで生成された地図になります。
次はこの地図を使って目的の場所までの自律走行にチャレンジします。