Mini Pupper 2の脚の組み立てができましたので、脚や腰を正しく動かすためにサーボモーターの調整を行います。
microSDカードの準備とWiFi接続
組み立てマニュアルにイメージファイルの入手先が書かれています。

Assemble Mini Pupper 2 — Mini Pupper 1.0.0-alpha documentation
minipupperdocs.readthedocs.io
作業手順は以下のようになります。
- pre-built-imagesにあるv2_stanford_1.0.2.1_20230820.img.zipをダウンロードします。
- Raspberry Pi ImagerでSDカードに書き込みます。
- Mini Pupper 2にHDMIモニタ、USBキーボードを接続し、SDカードをセットして電源を入れます。
- HDMIモニタでUbuntu 22.04の起動が確認できたらログインします。
- Default username: ubuntu
- Default password: mangdang
- WiFiに接続するため設定ファイルを追加します。
- sudo vi /etc/netplan/99-custom-wifi.yaml
- rebootします。
- sudo reboot
/etc/netplan/99-custom-wifi.yamlには以下のように記述しました。
network:
wifis:
wlan0:
access-points:
YOUR-SSID:
password: YOUR-PASSWORDWiFiが正常に接続できれば、表示パネルにDHCPで取得されたIPアドレスが表示されます。
他のPCからこのIPアドレスにsshすればMini Pupper 2のRaspberry Pi 4にログインできます。
ssh [email protected]
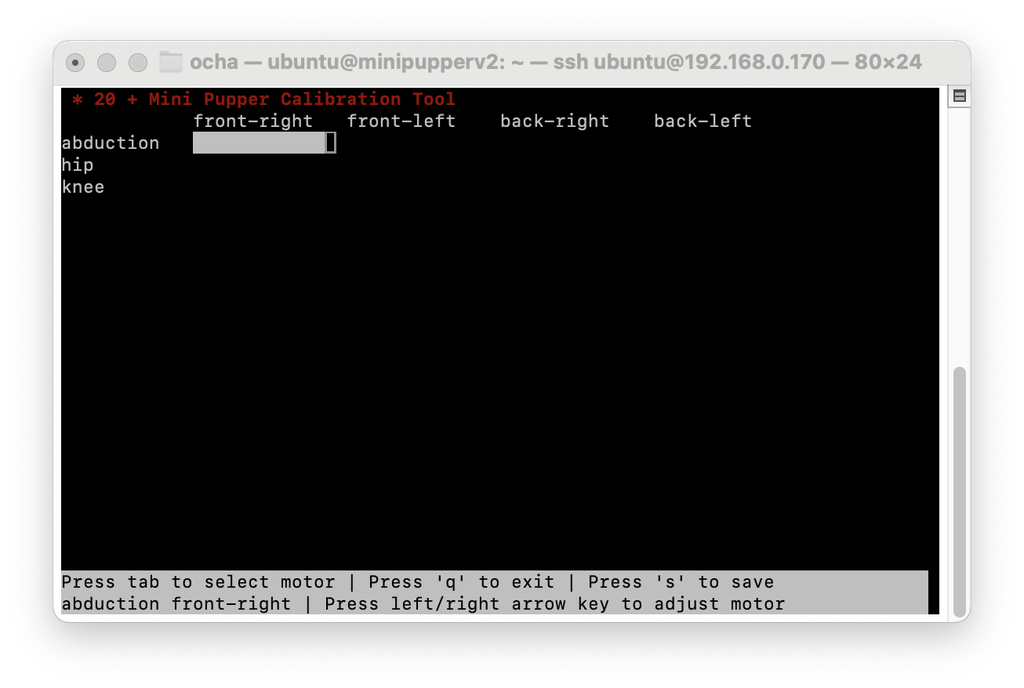
サーボモーターのキャリブレーション
Mini Pupper 2にsshでログインしてcalibrateツールをたちあげます。この画面でサーボモーターを1つずつ動かしながら脚と腰の位置を調整していきます。
この作業を行っている最中にバッテリー低下の警告が出てしまいました。一旦作業を中断して、Raspberry Pi 4をshutdownして、バッテリーの充電用USB端子から充電開始です。
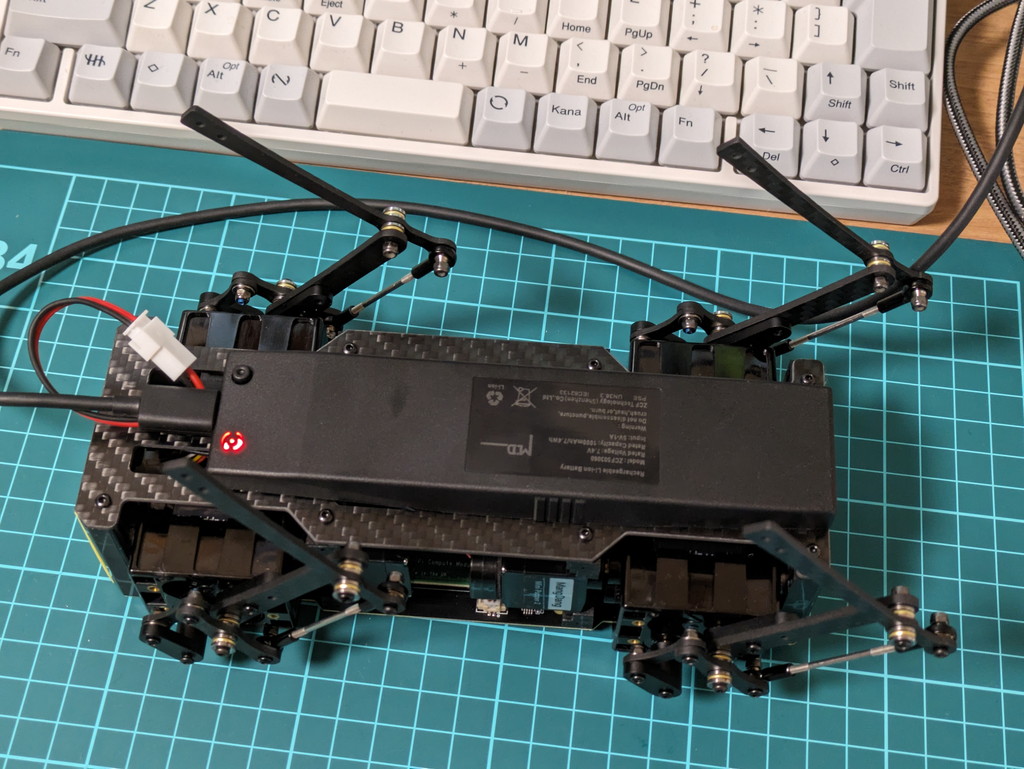
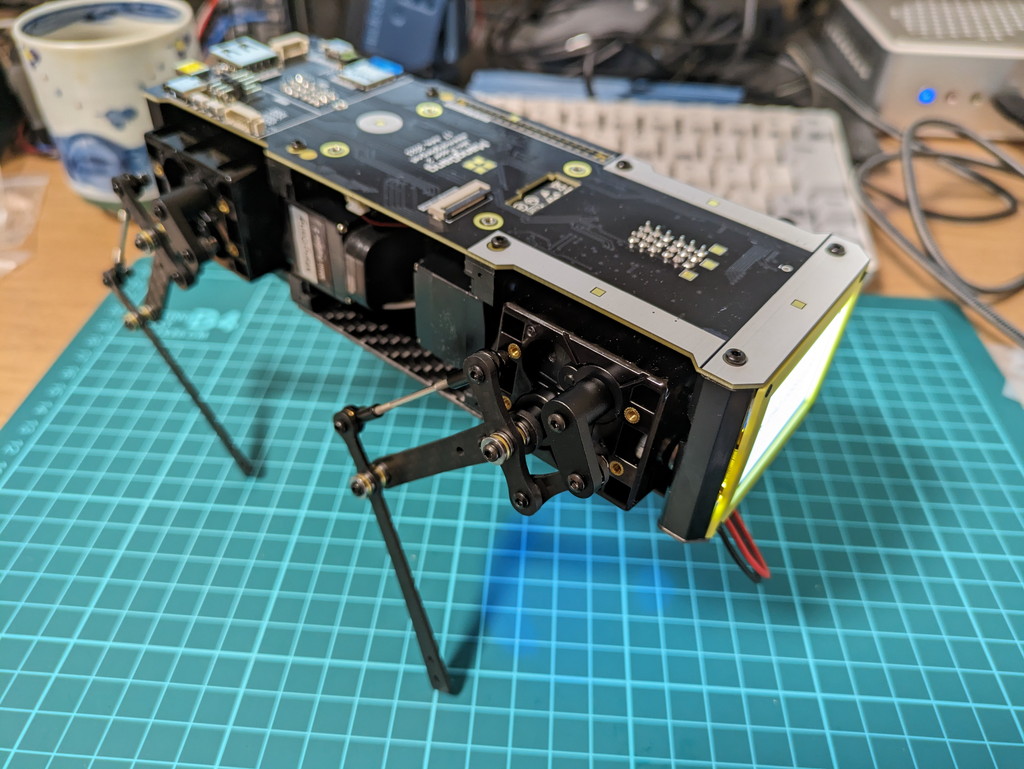
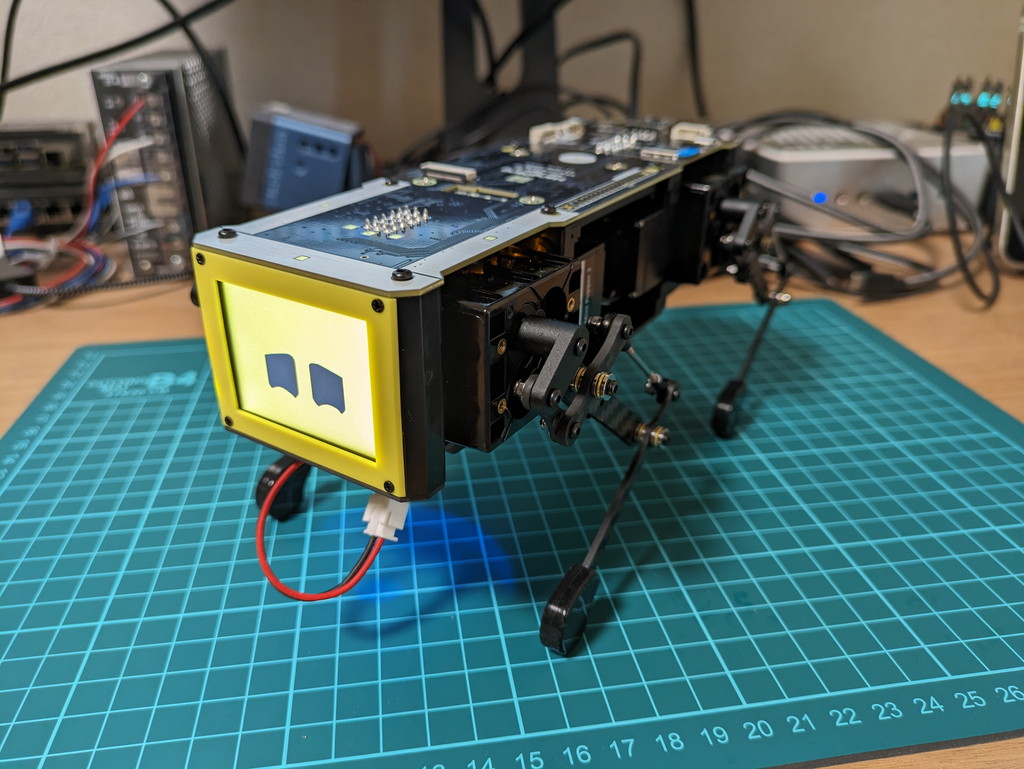
バッテリーが充電されたのちに再びキャリブレーション作業をして、Mini Pupper 2が動き出しました。
Web GUIでの動作確認
Mini Pupper 2のファームウェアに搭載されているGUIツールを使って動作確認を行います。電源投入時に表示されるIPアドレスにWebブラウザで接続します。プロトコルはhttpでポートは8080です。
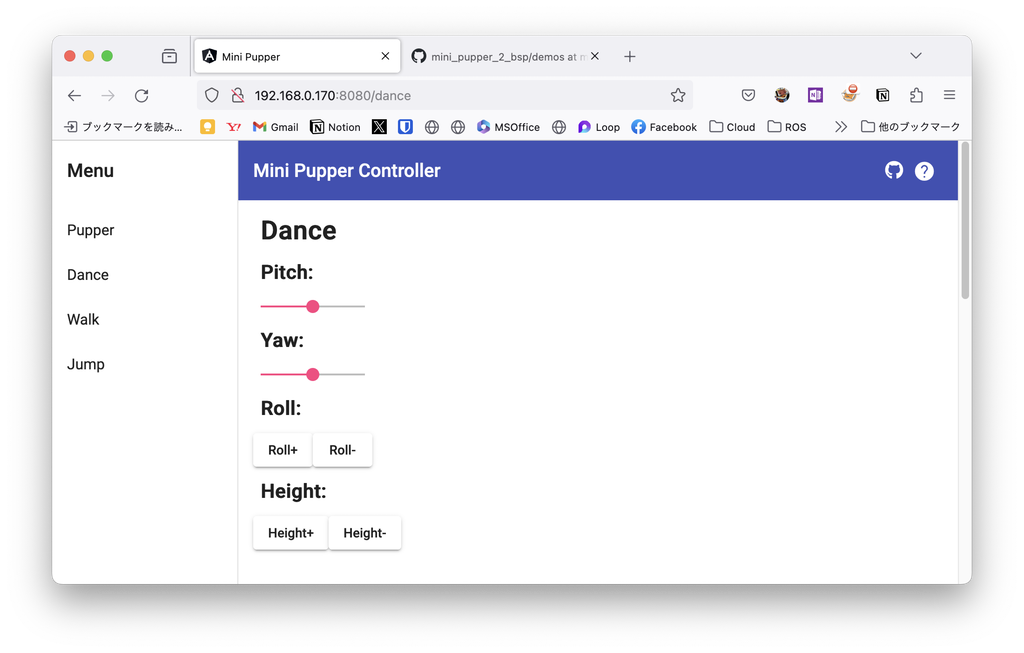
一応うまく動作しているようです。
このあとROS2のセットアップを行います。

