 kobuki
kobuki TurtleBot2 kobukiがやってきた #5(ROS2リモート制御編)
kobukiを自由に走行させるためにはkobuki本体に小型のPCを搭載して、その上でROS2が動作する必要があります。今回はこのPCの環境整備を行いkobukiに載せてリモートで制御できるようにします。小型PCは何を使うかUbuntu 2...
kobuki 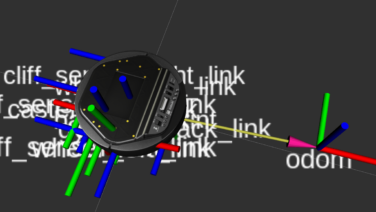 kobuki
kobuki  kobuki
kobuki  kobuki
kobuki  kobuki
kobuki  RISC-V
RISC-V  COSMAC
COSMAC  FPGA
FPGA  Raspberry Pi
Raspberry Pi  Mini Pupper 2
Mini Pupper 2