これまでROSをVMWare上のUbuntu 18.04 LTSで動かしてきましたが、動作が重いので改善したいと考えていました。最近使っていなかったThinkCentre M73 Tiny (Core i3-4130T, 8GB RAM, 250GB SSD)を引っ張りだして、Windows10を削除し、ROS専用のUbuntuデスクトップ環境にしてみました。
Ubuntuデスクトップ専用環境でROS+Gazeboを動かす
定番のRufusでUbuntu Desktop 18.04 LTS 日本語RemixのISOイメージをUSBメモリ(やや古めの4GB)に書き込み、ブートしましたが、なぜか途中で止まってしまいます。
おかしいなと別のUSBメモリ(新しめの32GB)に書き込んでブートしたら問題なく立ち上がってくれました。OSブートの場合は古いUSBメモリは使わないのが良さそうです。
インストールが完了し、ROSとGazeboの環境を準備しました。このあたりは何度もインストールしているので、GitHubにまとめたドキュメントを見ながらです。
ROSとGazeboを動かしてみると、なんとヌルヌル快適に動きます。いままでVMWareで苦労して動かしていたのは何だったのでしょうか。
Ubuntuデスクトップ環境を本気で整備してみる
せっかくなのでこのUbuntuデスクトップ環境を本気で整備してみることにしました。日本語Remix版をインストールしているので、すぐ日本語入力が使えるのも嬉しいところです。
最近はアプリケーションがクラウドになっているものが多いので、Webブラウザがあれば大抵のものは使えます。私がよく使っているものは以下のものです。
- OneDrive
- OneNote
- Googleスプレッドシート
- Googleドライブ
- Box
- TweetDeck (Twitter)
- Slack
- Zoom
これらはすべてブラウザで動きますが、Linux版のアプリもいくつかありました。今回はSlackアプリとZoomアプリのLinux版をインストールしました。
あとVisual Studio Codeも忘れずにインストールです。
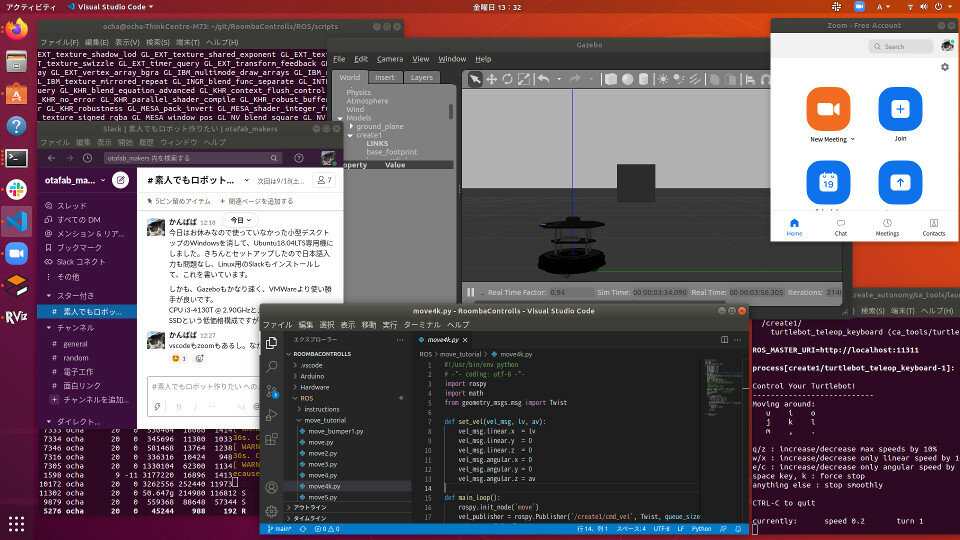
最終的にはこのような素晴らしいROS開発環境が構築できました。
Ubuntuデスクトップ環境良いかも!
これまでは気軽に仮想環境が作れるので、VMを作っては壊しということを繰り返していました。このため今回のようにじっくりとUbuntuのデスクトップ環境に取り組む機会がなかったのですが、最近はクラウドサービスやLinux版アプリが充実し、必ずしもWindowsやmacOSを使う必要はなくなってきたのかもしれません。今後はノートPCでもUbuntuデスクトップ環境を作ってみたいと思います。
追伸:本記事はすべて今回作成したUbuntuデスクトップ環境で書きました。写真はGIMPで加工しています。

