 Roomba
Roomba ルンバで自律走行を行ってみました (おおたfab 第57回 素人でもロボットをつくりたい)
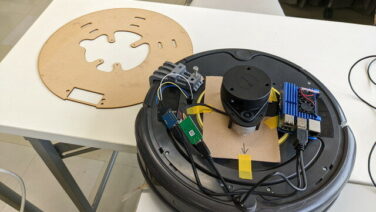
おおたfabさんでは、「素人でもロボットをつくりたい」という勉強会を定期的に行っています。前回はLiDARを使って地図の作成を行いましたが、今回はNavigation(自律走行)にチャレンジします。写真に写っていますが、現在LiDARやRa...
Roomba  Roomba
Roomba  Roomba
Roomba  Roomba
Roomba 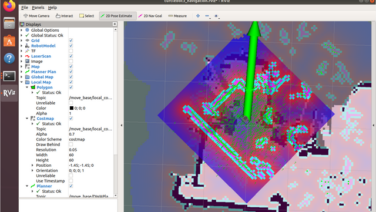 TurtleBot3
TurtleBot3  TurtleBot3
TurtleBot3  TurtleBot3
TurtleBot3  TurtleBot3
TurtleBot3  TurtleBot3
TurtleBot3  Romi
Romi