 Electronics
Electronics スタックチャンを組み立てました
前々から気になっていた@meganetaaanさんのスタックチャンですが、3Dプリンタも自宅に導入したので公開されているデータをもとに製作してみました。製作に必要なデータはGithubから入手しています。 meganetaaan/stack...
Electronics 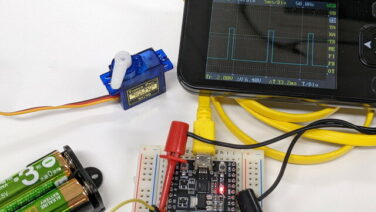 Electronics
Electronics  Electronics
Electronics 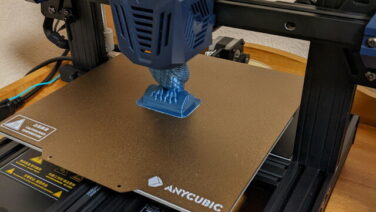 3Dプリンタ
3Dプリンタ 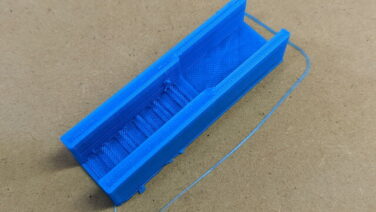 3Dプリンタ
3Dプリンタ  Robot
Robot  Robot
Robot  Robot
Robot  Robot
Robot  Robot
Robot